Как действуют асинхронные электромоторы
Среди всех агрегатов переменного тока, чаще всего во многих сферах используются асинхронные двигатели трехфазного тока. Общий принцип работы асинхронного мотора очень простой и будет рассмотрен ниже. Их количество составляет примерно 90% от всех выпускаемых изделий этого типа. Данные устройства широко используются в промышленности, на транспорте, в сельском хозяйстве и многих других областях.
![]()
Агрегаты асинхронного типа также, как и другие, выпускаются и используются для трансформации переменного тока в механическую работу вала. Если объяснять по-простому, для чайников, понятие асинхронный возникло из-за разницы, возникающей между частотами, с которыми вращаются магнитные поля статоров и роторов. Частота у статора во всех случаях превышает частоту вращения ротора.
Конструкция асинхронного двигателя
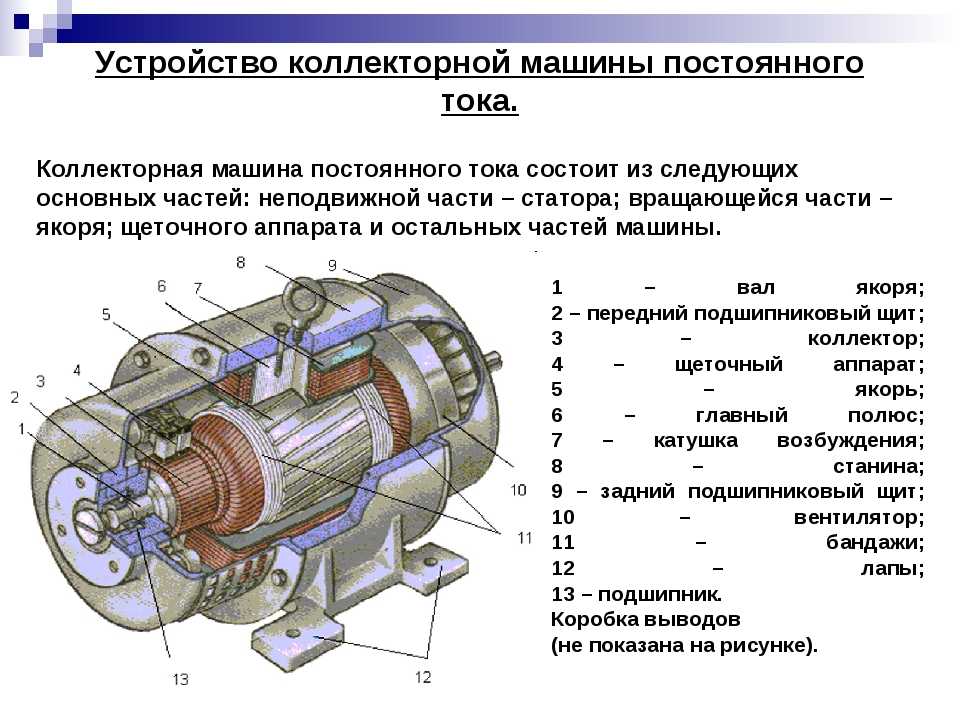
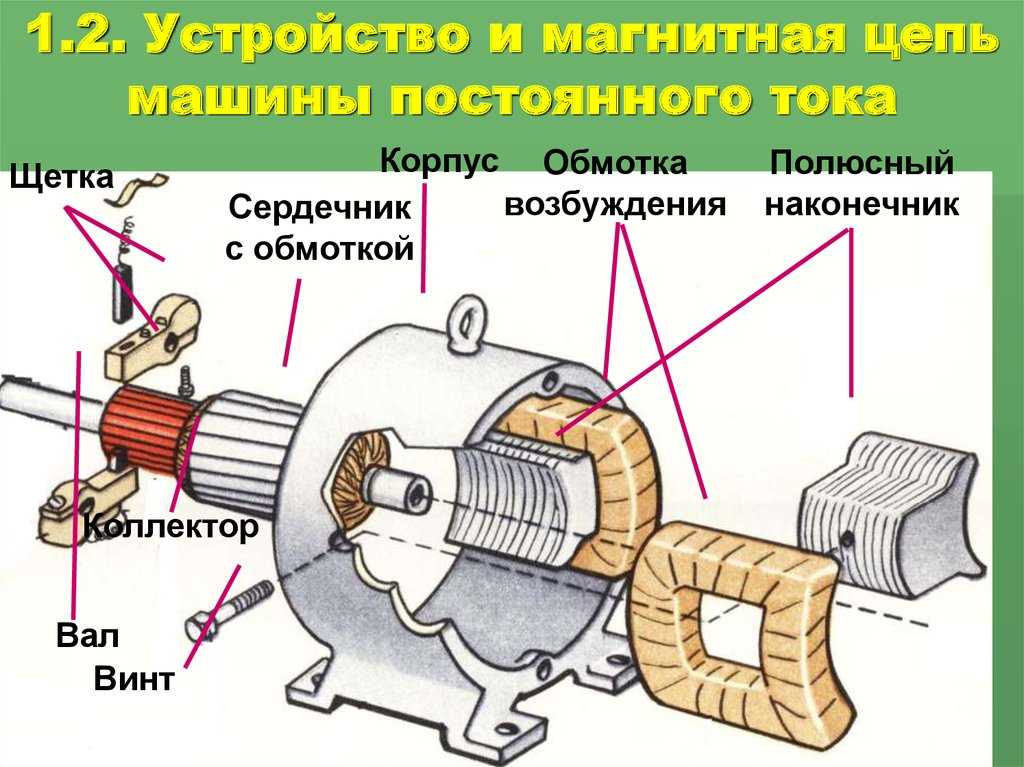
В конструкцию асинхронного электродвигателя входят две основные детали – статор и ротор.
Для изготовления статора используются стальные листы, а сам он имеет форму цилиндра. В пазы конструкции укладываются обмотки из медных проводников. Их оси сдвинуты в пространстве относительно друг друга на 120 градусов. Соединение между собой концов каждой обмотки осуществляется по разным вариантам – в виде звезды или треугольником.
Роторные части асинхронных моторов изготавливаются в двух вариантах. В первом случае это изделия с короткозамкнутым ротором, собираемым в форме сердечника из стальных пластинок. В его пазы заливается алюминий в расплавленном виде, что приводит к образованию стержней, коротко замкнутых с торцевыми кольцами. В агрегатах повышенной мощности алюминиевый расплав по технологии заменяется медью.
![]()
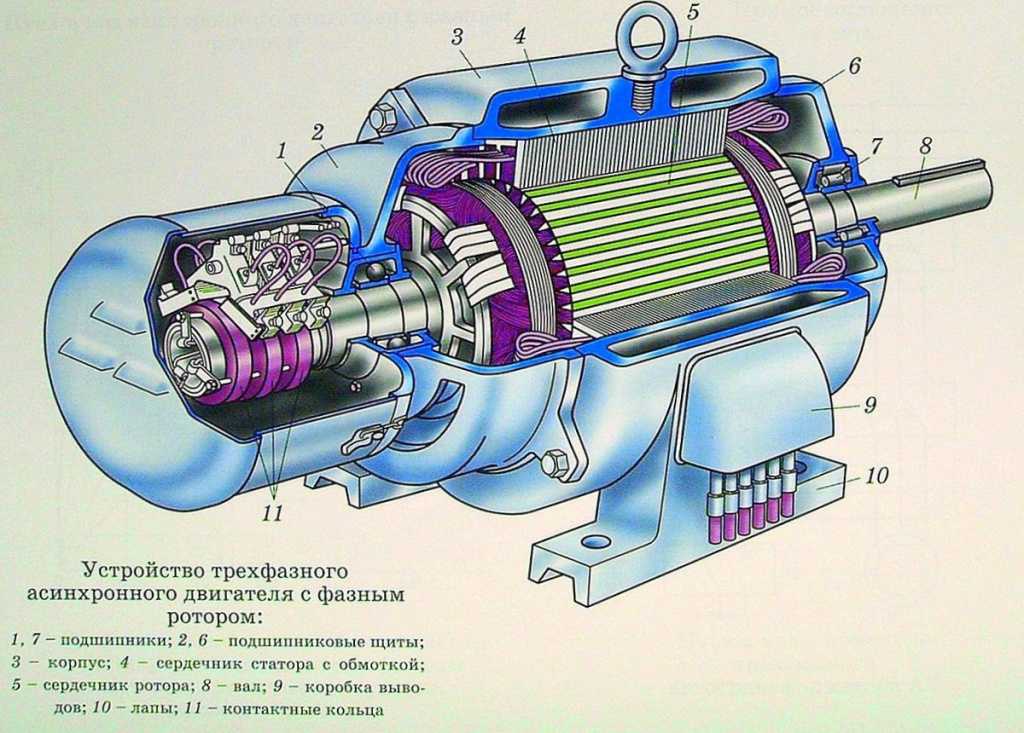
Второй вариант представляет собой фазный ротор, имеющий такую же трехфазную обмотку, аналогичную обмотке у статора. Как правило, соединение обмоток в этом случае осуществляется звездой, а их свободные концы соединяются с контактными кольцами. Эти же кольца соединяются со щетками, обеспечивающими использование добавочного резистора. Данный элемент уменьшает слишком высокое значение пусковых токов.
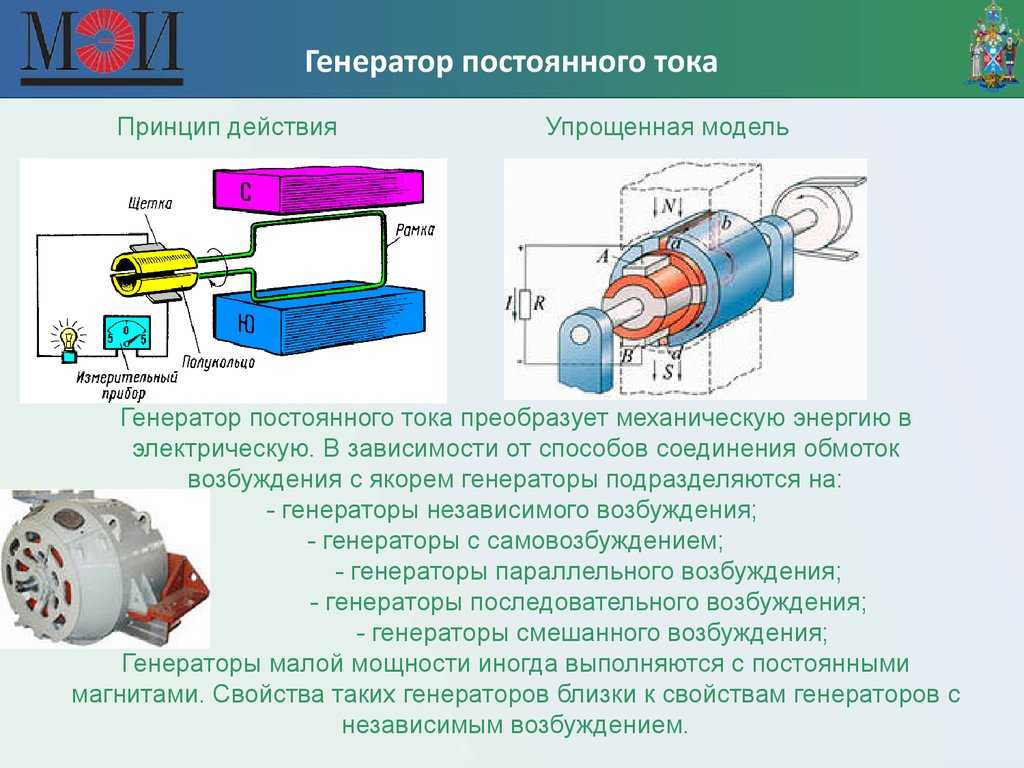
Когда к обмотке трехфазного статора подается напряжение, во всех фазах возникает магнитный поток, изменяющийся с такой же частотой, как и в поступающем напряжении. У всех магнитных потоков имеется сдвиг на 120 градусов по отношению друг к другу. В результате образуется общий магнитный поток, который и обеспечивает собственное вращение. Он оказывает влияние на проводники роторных обмоток и создает в них ЭДС.
Образовавшийся ток начинает взаимодействовать с магнитным потоком статора, что, в результате, приводит к возникновению пускового момента электромотора. То есть, ротор устремляется к повороту в том же самом направлении, в каком осуществляется вращение магнитного поля статора. После того как пусковой момент превысит тормозной момент ротора, вал двигателя начнет вращаться.
https://youtube.com/watch?v=5F4lQ-03D1Y
![]()
Тяговый электродвигатель: назначение и применение
![]()
Виды электродвигателей: устройство, принцип работы
![]()
Подключение асинхронного электродвигателя
![]()
Схема реверса электродвигателя с магнитным пускателем
![]()
Крановые электродвигатели
![]()
Принцип действия синхронного двигателя
Области использования
Благодаря тому, что универсальный двигатель может иметь высокую скорость вращения при работе от однофазной сети переменного тока без использования дополнительных преобразовательных устройств, он получил широкое применение в таких домашних приборах как пылесосы, блендеры, фены и др. Так же универсальный электродвигатель широко используется в таких инструментах, как дрели и шуруповерты.






Благодаря тому, что скорость вращения универсального двигателя легко регулируется изменением величины питающего напряжения ранее он широко использовался в стиральных машинах. Сейчас благодаря развитию преобразовательной техники более широкое использование получают бесщеточные электродвигатели (СДПМ, ) скорость вращения которых регулируется изменением частоты напряжения питания.
ГОСТ 27471-87 Машины электрические вращающиеся. Термины и определения.
Е.В.Арменский, Г.Б.Фалк. Электрические микромашины. Изд. 2-е, перераб. и доп.: Учеб. пособие для электротехн. специальностей вузов.- М.: Высш. школа, 1975.
М.М.Кацман. Электрические машины и электропривод автоматических устройств: Учебник для электротехнических специальностей техникумов.- М.: Высш. шк., 1987.
Область применения
Несмотря на то, что себестоимость этого типа двигателя намного дороже асинхронных машин, их особенности могут сыграть решающую роль в узкоцелевом специальном назначении.
С помощью таких двигателей приводятся в работу прокатные станы, они используются для привода гребного винта на кораблях, а также для транспортных средств, имеющих систему питания на постоянном токе.
Поэтому их область использования характерна для нужд там, где необходима электрическая тяга, это: тепловозы, электровозы, электропоезда, городской транспорт, то есть там, где необходимо применить мягкие механические характеристики и широкие пределы регулировки количества оборотов вращения.
Пишите комментарии, дополнения к статье, может я что-то пропустил. Загляните на карту сайта, буду рад, если вы найдете на моем сайте еще что-нибудь полезное. Всего доброго.
Краткая история создания
Первопроходцем в истории создания электрических двигателей стал М.Фарадей. Создать полноценную рабочую модель он не смог, зато именно ему принадлежит открытие, которое сделало это возможным. В 1821 году он провел опыт с использованием заряженной проволоки, помещенной в ртуть в ванную с магнитом. При взаимодействии с магнитным полем металлический проводник начинал вращаться, превращаю энергию электрического тока в механическую работу. Ученые того времени работали над созданием машины, работа которой основывалась бы на этом эффекте. Они хотели получить двигатель, работающий по принципу поршневого, то есть, чтобы рабочий вал двигался возвратно-поступательно.
В 1834 году был создан первый электрический двигатель постоянного тока, который разработал и создал русский ученый Б.С.Якоби. Именно он предложил заменить возвратно-поступательное движение вала его вращением. В его модели два электромагнита взаимодействовали между собой, вращая вал. В 1839 году он же успешно испытал лодку, оснащенную ДПТ. Дальнейшая история этого силового агрегата, по сути – это совершенствование двигателя Якоби.
5.14. ОДНОФАЗНЫЕ АСИНХРОННЫЕ ДВИГАТЕЛИ
Статор однофазного двигателя
имеет однофазную обмотку, которая занимает 2/3 общего числа пазов статора. Ротор
— коротко-замкнутый.
При подключении к сети
однофазная статорная обмотка создает не вращающийся, а пульсирующий магнитный
поток с амплитудой Ф. Этот поток может быть искусственно разложен на два вращающихся
потока ФI и ФII, каждый из которых равен Ф/2. Обозначим
ФI прямым потоком, а ФII — обратным. Частота вращения
каждого потока — n1I=n1II=n1.
Предположим, что ротор
двигателя уже вращается в направлении прямого потока. Тогда скольжение двигателя
относительно прямого потока ФI равно:
,
а относительно обратного потока:
.
Потоки ФI и
ФII наводят в обмотке ротора ЭДС E2I и E2II,
которые создают токи I2I и I2II. Известно, что частота
тока в обмотке ротора пропорциональна скольжению f2=Sf1.
Т.к. SII>SI, то ток, наведенный обратным полем, имеет
частоту намного больше частоты, наведенной в обмотке ротора прямым полем f2II>f2I.
Пусть n1=1500 об/мин, n2=1450 об/мин, f1=50 Гц, тогда:
Нам также известно, что
индуктивное сопротивление роторной обмотки x2 зависит от частоты
f2:
Поскольку f2I<<f2II,
то и сопротивление x2I<<x2II
Переходя к токам I2,
которые, как известно, обратно пропорциональны сопротивлениям x2,
можно записать: I2I>>I2II.
Вращающие моменты двигателя
пропорциональны магнитным потокам статора и токам в обмотке ротора. (М~ФI2).
Исходя из значений токов
I2I и I2II и учитывая, что ФI=ФII
можно записать:
Следовательно, если ротор
двигателя уже вращается в сторону прямого потока, то он будет продолжать вращаться
в этом направлении. Тормозящее воздействие МII не будет оказывать
заметного влияния на работу двигателя.
Вспомним, что мы условно
предполагали вращение ротора в сторону прямого потока ФI. А если
бы он вращался вначале в сторону обратного потока ФII?
Тогда, проведя аналогичные
рассуждения, можно заключить, что ротор будет устойчиво вращаться в сторону
обратного потока. Рассмотрим механическую характеристику однофазного двигателя
(рис. 5.14.2).


Из характеристики М=f(S)
видно, что при пуске, когда S=1, пусковой момент Мп=О. Двигатель
при включении его в сеть сам не начнет вращаться. Необходим его сдвиг в ту или
иную сторону.
Если сдвинуть точку Мп
влево от S=1, то момент будет положительным, если вправо — отрицательным.
Другими словами, направление
устойчивого вращения ротора двигателя будет зависеть от направления первоначального
импульса.
Проведенный анализ показал, что однофазный двигатель нуждается в принудительном пуске.
Пусковые устройства могут быть механическими (пуск от руки) и электрическими.
Первый способ пуска практически выжил себя, и на его смену пришел второй — электрический.
Для создания необходимого пускового момента однофазный двигатель снабжается дополнительной пусковой обмоткой.
Эта обмотка размещается в оставшейся незаполненной 1/3 пазов.
Однофазный двигатель, таким
образом, превратился в двухфазный. Двухфазный двигатель обладает вращающимся
магнитным полем, если выполнены два обязательных условия.
Первое условие состоит
в пространственном сдвиге рабочей и пусковой обмоток на 90 эл. градусов. Такое
условие, легко реализуется на заводе-изготовителе.
Второе обязательное условие
диктуется сдвигом по фазе тока в пусковой обмотке на 90° относительно тока в
рабочей обмотке. Выполнение этого условия связано с включением в пусковую обмотку
фазосдвигающего элемента, например, конденсатора (рис. 5.14.3).
После того как ротор двигателя
придет во вращение, пусковую обмотку ПО отключают. Делается это с
помощью выключателя В. Иногда в бытовой технике отключение пусковой обмотки
производится автоматически по ходу разгона двигателя.
Принцип работы и устройство синхронного электродвигателя переменного тока
http-equiv=»Content-Type» content=»text/html;charset=UTF-8″>pan itemprop=»image» itemscope itemtype=»https://schema.org/ImageObject»>![]()
Данный вид электродвигателя используется в быту там, где необходима постоянная скорость вращения, возможность ее регулировки, а так же если необходима скорость вращения более 3000 оборотов в минуту (это максимум для асинхронных).
Синхронные моторы устанавливаются в электроинструменте, пылесосе, стиральной машине и т. д.
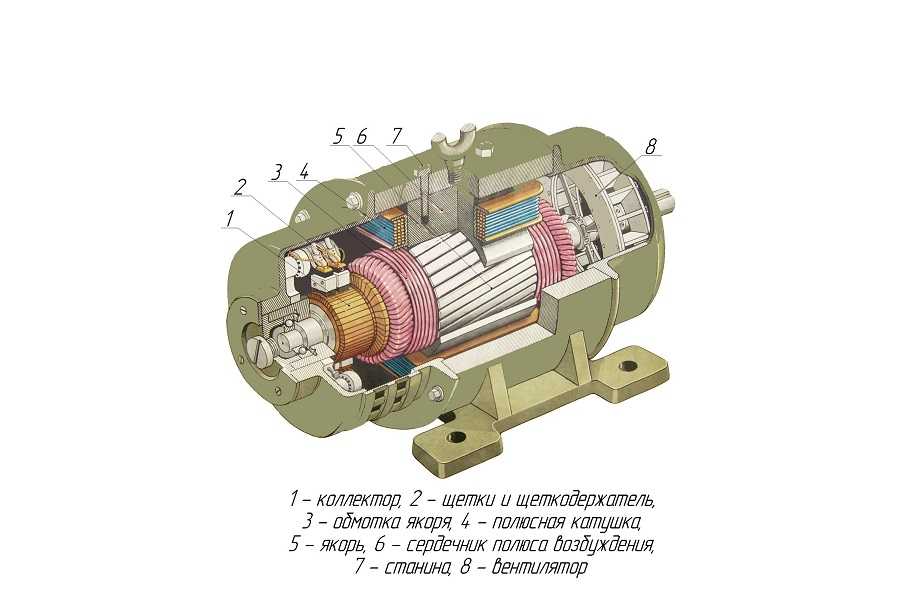
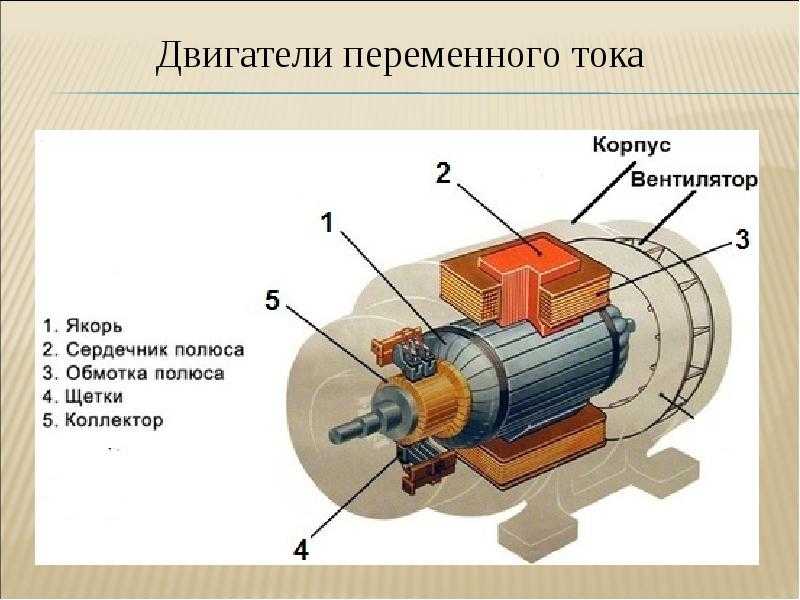
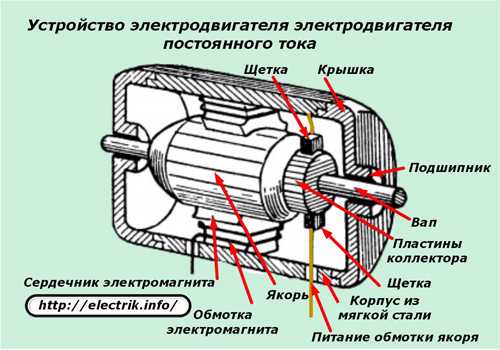
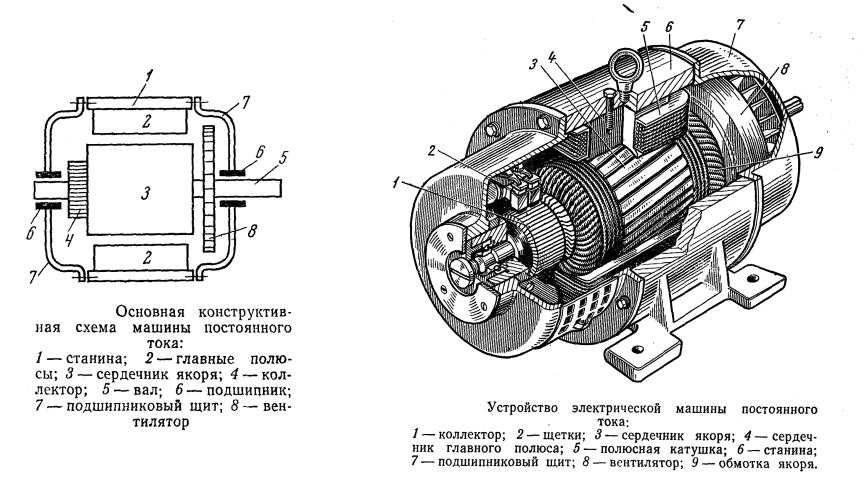
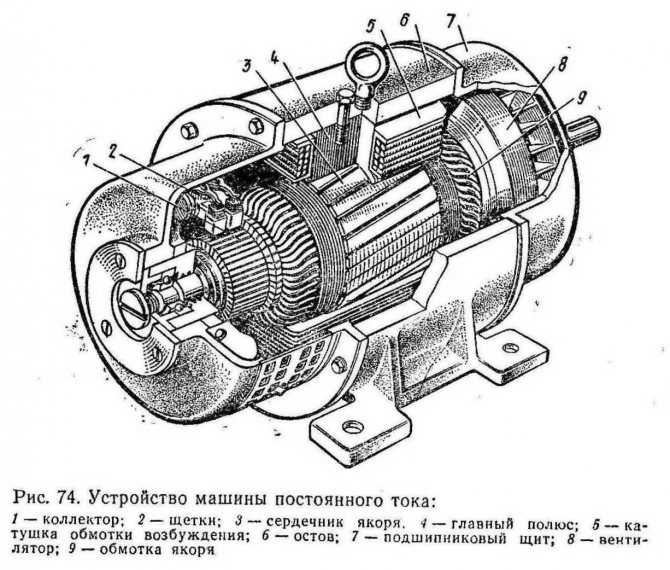
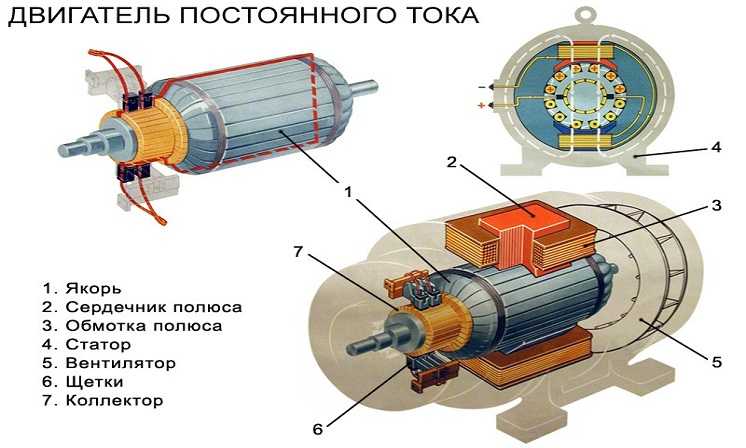
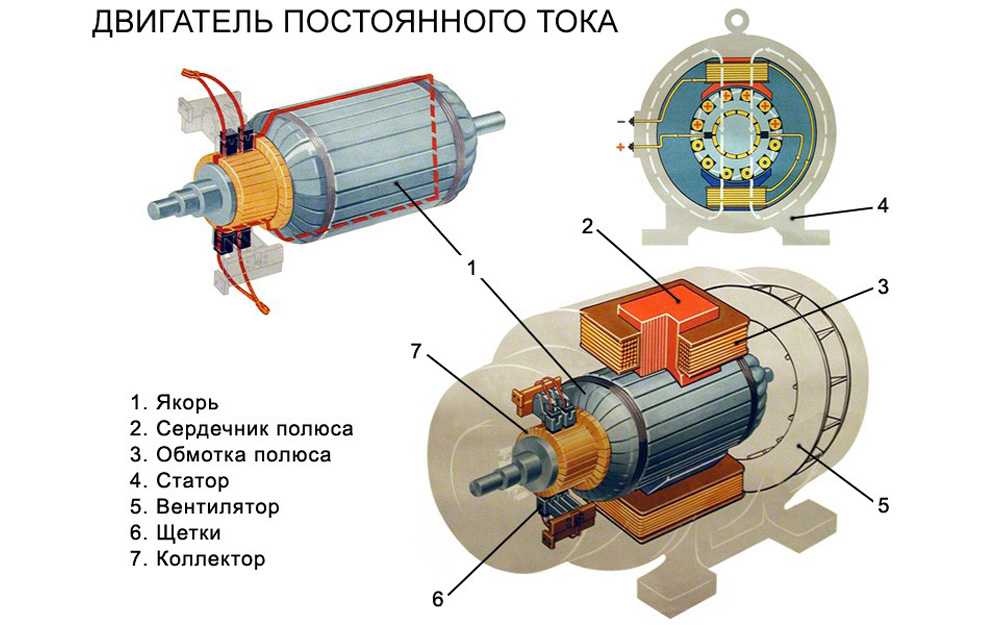
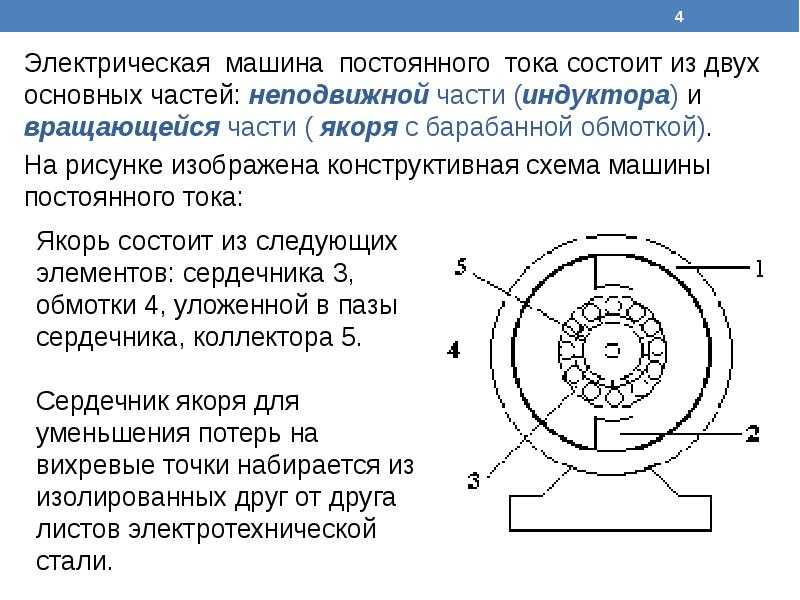
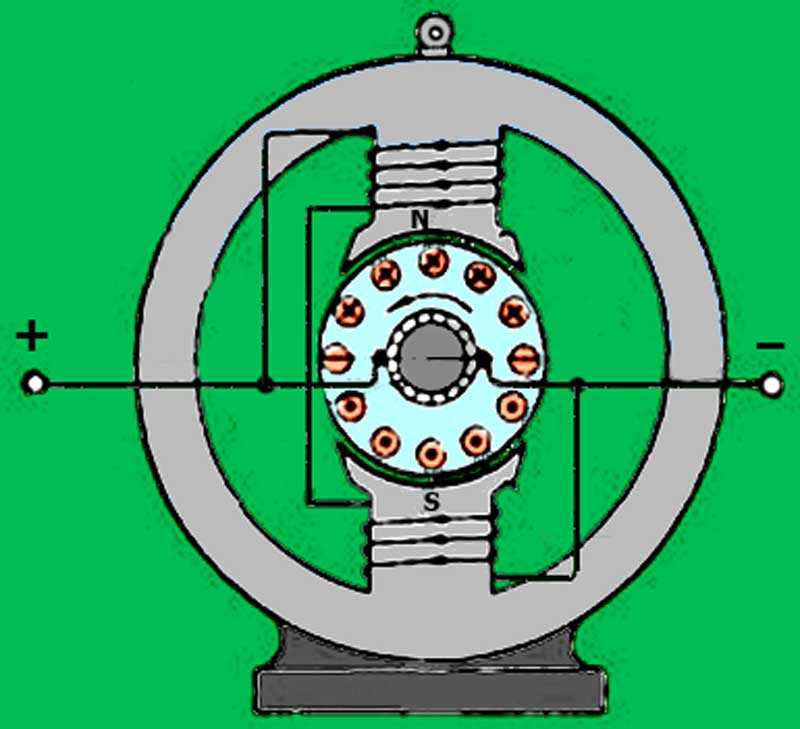
В корпусе синхронного двигателя переменного тока расположены обмотки (3 на рисунке), которые также намотаны и на ротор или якорь (1). Их выводы припаяны к секторам токосъемного кольца или коллектора (5), на которые при помощи графитовых щеток (4) подается напряжение. При чем выводы расположены так, что щетки всегда подают напряжение только на одну пару.
Наиболее частыми поломками коллекторных двигателей является:
- Износ щетокили их плохой их контакт из-за ослабления прижимной пружины.
- Загрязнение коллектора.Чистите либо спиртом или нулевой наждачной бумагой.
- Износ подшипников.
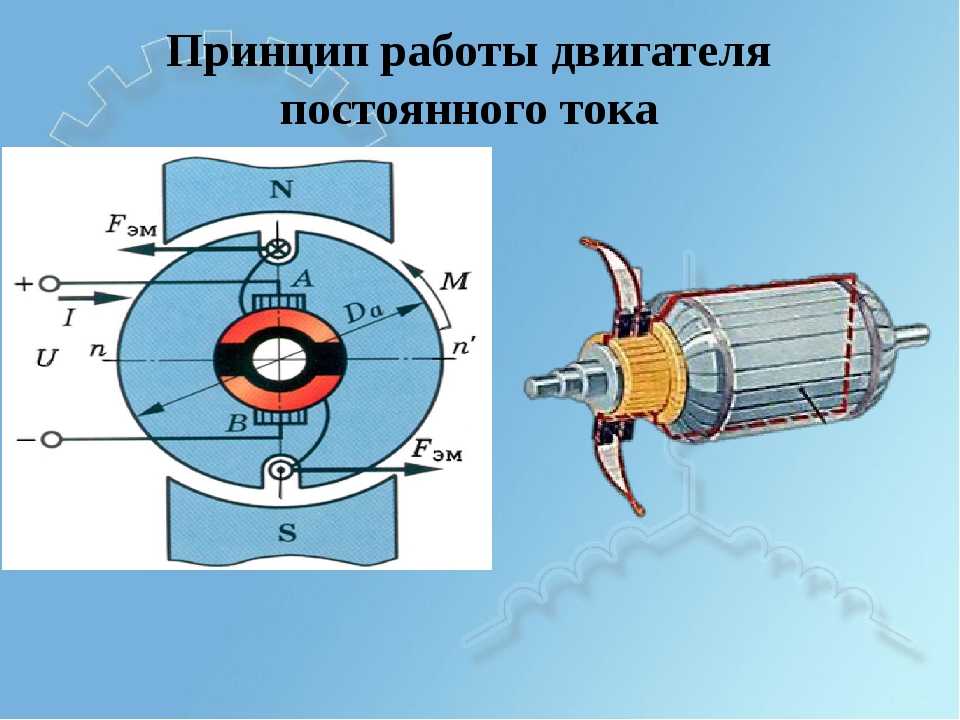
Принцип работы. Вращающий момент в электромоторе создается в результате взаимодействия между током тока якоря и магнитным потоком в обмотке возбуждения. С изменением направления переменного тока будет меняться и направление магнитного потока одновременно в корпусе и якоре, благодаря чему вращение всегда будет в одну сторону.
Регулировка скорости вращения меняется методом изменения величины подаваемого напряжения. В дрелях и пылесосах для этого используется реостат или переменное сопротивление.
Изменение направления вращения происходит также как и у двигателей постоянного тока, о которых Я расскажу в следующей статье.
Самое главное о синхронных двигателях Я постарался изложить, более подробно Вы можете прочитать на них на Википедии.
Классификация электродвигателей
| Вращающийся электродвигатель | ||||
|---|---|---|---|---|
| Само коммутируемый | Внешне коммутируемый | |||
| С механической коммутацией (коллекторный) | С электронной коммутацией1 (вентильный2, 3) | Асинхронный электродвигатель | Синхронный электродвигатель | |
| Переменного тока | Постоянного тока | Переменного тока4 | Переменного тока | |
|
|
|
|
|
| Простая электроника | Выпрямители,транзисторы | Более сложнаяэлектроника | Сложная электроника (ЧП) |
Примечание:
- Указанная категория не представляет отдельный класс электродвигателей, так как устройства, входящие в рассматриваемую категорию (БДПТ, ВРД), являются комбинацией бесколлекторного двигателя, электрического преобразователя (инвертора) и, в некоторых случаях, — датчика положения ротора. В данных устройствах электрический преобразователь, в виду его невысокой сложности и небольших габаритов, обычно интегрирован в электродвигатель.
- Вентильный двигатель может быть определен как электрический двигатель, имеющий датчик положения ротора, управляющий полупроводниковым преобразователем, осуществляющим согласованную коммутацию обмотки якоря .
- Вентильный электродвигатель постоянного тока — электродвигатель постоянного тока, вентильное коммутирующее устройство которого представляет собой инвертор, управляемый либо по положению ротора, либо по фазе напряжения на обмотки якоря, либо по положению магнитного поля .
- Электродвигатели используемые в БДПТ и ВРД являются двигателями переменного тока, при этом за счет наличия в данных устройствах электрического преобразователя они подключаются к сети постоянного тока.
- Шаговый двигатель не является отдельным классом двигателя. Конструктивно он представляет из себя СДПМ, СРД или гибридный СРД-ПМ.
Аббревиатура:
- КДПТ — коллекторный двигатель постоянного тока
- БДПТ — бесколлекторный двигатель постоянного тока
- ЭП — электрический преобразователь
- ДПР — датчик положения ротора
- ВРД — вентильный реактивный двигатель
- АДКР —
- АДФР —
- СДОВ — синхронный двигатель с обмоткой возбуждения
- СДПМ — синхронный двигатель с постоянными магнитами
- СДПМП —
- СДПМВ —
- СРД — синхронный реактивный двигатель
- ПМ — постоянные магниты
- ЧП — частотный преобразователь
Принцип действия [ править | править код ]
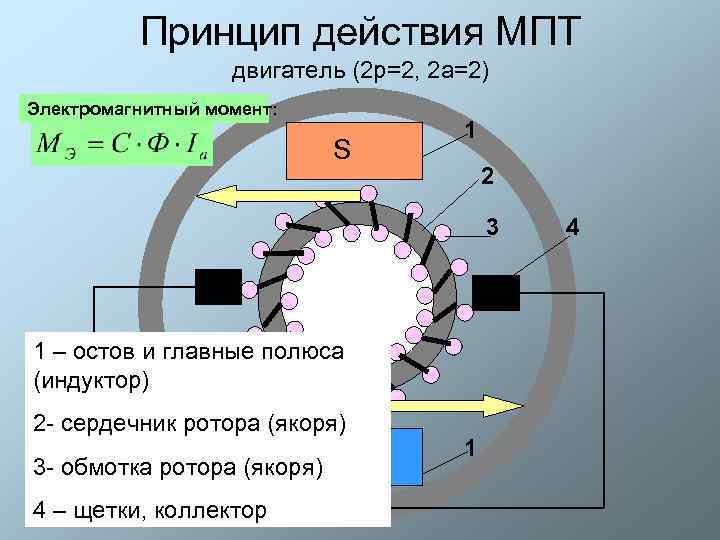
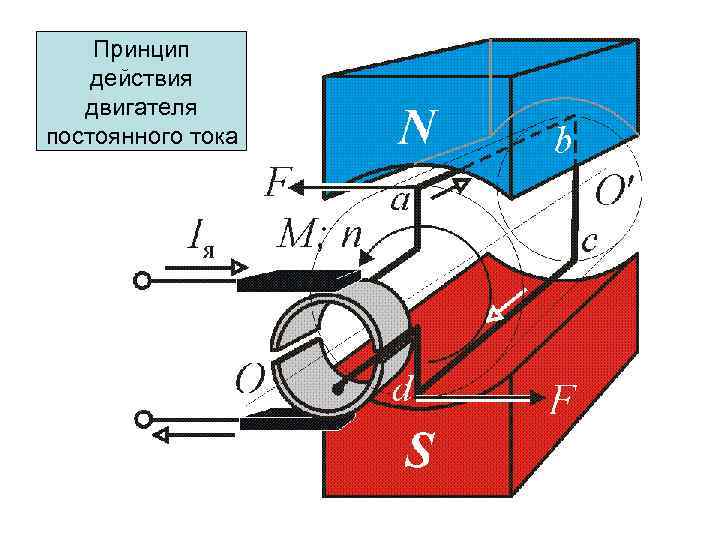
В основу работы подавляющего числа электрических машин положен принцип электромагнитной индукции. Электрическая машина состоит из неподвижной части — статора (для асинхронных и синхронных машин переменного тока) или индуктора (для машин постоянного тока) и подвижной части — ротора (для асинхронных и синхронных машин переменного тока) или якоря (для машин постоянного тока). В роли индуктора на маломощных двигателях постоянного тока очень часто используются постоянные магниты.


Ротор асинхронного двигателя может быть:
- короткозамкнутым;
- фазным (с обмоткой) — используются там, где необходимо уменьшить пусковой ток и регулировать частоту вращения асинхронного электродвигателя. В большинстве случаев это крановые электродвигатели серии МТН, которые повсеместно используются в крановых установках.
Якорь — это подвижная часть машин постоянного тока (двигателя или генератора) или же работающего по этому же принципу так называемого универсального двигателя (который используется в электроинструменте). По сути универсальный двигатель — это тот же двигатель постоянного тока (ДПТ) с последовательным возбуждением (обмотки якоря и индуктора включены последовательно). Отличие только в расчётах обмоток. На постоянном токе отсутствует реактивное (индуктивное или ёмкостное) сопротивление. Поэтому любая «болгарка», если из неё извлечь электронный блок, будет вполне работоспособна и на постоянном токе, но при меньшем напряжении сети.
Принцип действия трёхфазного асинхронного электродвигателя
При включении в сеть в статоре возникает круговое вращающееся магнитное поле, которое пронизывает короткозамкнутую обмотку ротора и наводит в ней ток индукции. Отсюда, следуя закону Ампера (на проводник с током, помещённый в магнитное поле, действует отклоняющая сила), ротор приходит во вращение. Частота вращения ротора зависит от частоты питающего напряжения и от числа пар магнитных полюсов.
Разность между частотой вращения магнитного поля статора и частотой вращения ротора характеризуется скольжением. Двигатель называется асинхронным, так как частота вращения магнитного поля статора не совпадает с частотой вращения ротора.
Синхронный двигатель имеет отличие в конструкции ротора. Ротор выполняется либо постоянным магнитом, либо электромагнитом, либо имеет в себе часть беличьей клетки (для запуска) и постоянные магниты или электромагниты. В синхронном двигателе частота вращения магнитного поля статора и частота вращения ротора совпадают. Для запуска используют вспомогательные асинхронные электродвигатели, либо ротор с короткозамкнутой обмоткой.
Асинхронные двигатели нашли широкое применение во всех отраслях техники. Особенно это касается простых по конструкции и прочных трёхфазных асинхронных двигателей с коротко-замкнутыми роторами, которые надёжнее и дешевле всех электрических двигателей и практически не требуют никакого ухода. Название «асинхронный» обусловлено тем, что в таком двигателе ротор вращается не синхронно со вращающимся полем статора. Там, где нет трёхфазной сети, асинхронный двигатель может включаться в сеть однофазного тока.
Статор асинхронного электродвигателя состоит, как и в синхронной машине, из пакета, набранного из лакированных листов электротехнической стали толщиной 0,5 мм, в пазах которого уложена обмотка. Три фазы обмотки статора асинхронного трёхфазного двигателя, пространственно смещённые на 120°, соединяются друг с другом звездой или треугольником.
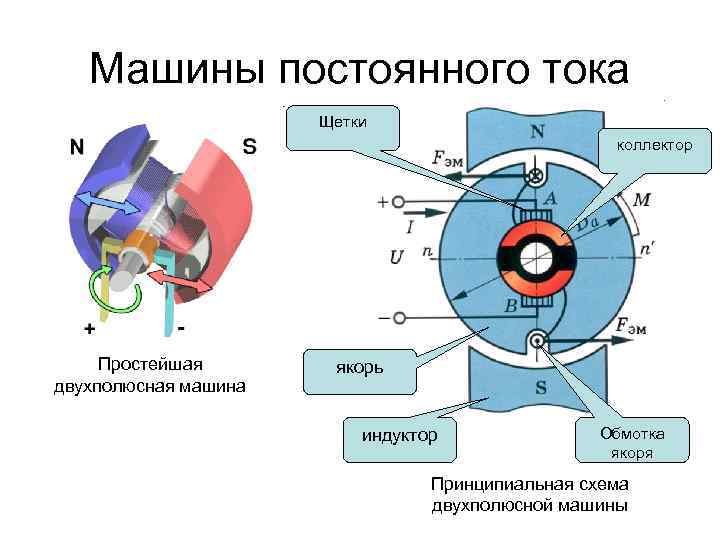
На рисунке показана принципиальная схема двухполюсной машины — по четыре паза на каждую фазу. При питании обмоток статора от трёхфазной сети получается вращающееся поле, так как токи в фазах обмотки, которые смещены в пространстве на 120° друг относительно друга сдвинуты по фазе друг относительно друга на 120°.
Для синхронной частоты вращения nc поля электродвигателя с р парами полюсов справедливо при частоте тока f : n c = 60 f p =<60f>
>>
При частоте 50 Гц получаем для p = 1, 2, 3 (двух-, четырёх- и шести-полюсных машин) синхронные частоты вращения поля n c > = 3000, 1500 и 1000 об/мин.
Ротор асинхронного электродвигателя также состоит из листов электротехнической стали и может быть выполнен в виде короткозамкнутого ротора (с «беличьей клеткой») или ротора с контактными кольцами (фазный ротор).
Виды электродвигателей: какой лучше
Описаны только основные виды электродвигателей и даны краткие характеристики, очень сжато описано устройство и принцип работы. Тем не менее, уже можно сделать выводы о том, что идеального решения, причём для всех случаев, просто нет. Есть наиболее подходящее для каждого конкретного случая.
- Асинхронный электродвигатель без частотного регулирования – лучший выбор для насосов.
- Коллекторный двигатель с его регулируемыми скоростями вне конкуренции для дрелей и пылесосов. И то, в последнее время стали делать с вентильными, они без щеток, что делает работу тише, срок службы дольше, хотя цену выше. Так что, тут, как посмотреть.
Выбирать вид электродвигателя надо под каждый конкретный случай
- Для вентиляторов с длительным режимом работы выбирать приходится между асинхронных и вентильных. Но только если они не слишком мощные. Для мощных важным является возможность разделения на секции, а это проще реализовать у вентильных. И даже на кулерах стали в последнее время использовать вентильные с магнитным ротором.
В общем, чтобы ответить какой лучше, надо рассматривать совокупность условий и характеристик работы
Принимать во внимание достоинства и недостатки, перебирать все виды электродвигателей и только так можно найти оптимальный
https://youtube.com/watch?v=LaD3T_U_rpQ
7.8. ТАХОГЕНЕРАТОРЫ ПОСТОЯННОГО ТОКА
Тахогенераторами называют электрические машины малой мощности, работающие
в генераторном режиме и служащие для преобразования частоты его вращения
в электрический сигнал.
Тахогенераторы постоянного тока по принципу действия и конструктивному
оформлению являются электрическими коллекторными машинами.
Выходной характеристикой тахогенератора является зависимость величины
на-пряжения на зажимах якоря Uя от частоты его вращения n при постоянном
магнитном потоке возбуждения Ф и постоянном сопротивлении нагрузки Rнагр
На рис. 7.8.1 показана выходная характеристика тахогенератора при различных
Rнагр.

![]()
7.9. МИКРОДВИГАТЕЛИ, ПРИМЕНЯЕМЫЕ В ДЕТСКОМ ТЕХНИЧЕСКОМ ТВОРЧЕСТВЕ
Разнообразие изделий детского технического творчества не позволяет
остановиться на конкретных решениях.
В структурные композиции любого подвижного объекта почти всегда входит
электродвигатель. Именно он преобразует электрическую энергию в механическое
движение.
Разновидность электропривода модели в первую очередь зависит от источника
питания.
Если модель работает автономно, то, естественно, для нее необходим и
автоном-ный источник питания. Это, как правило, электрохимическая батарейка
или аккумулятор.
При выборе схемы электропривода необходимо лишь согласовать напряжение
электродвигателя с источником питания.
В стационарных установках используется обычная электросеть напряжением
220, 127 В. Для понижения напряжения до безопасного уровня применяются
понижающие трансформаторы и иногда выпрямители переменного тока в постоянный.
Такие приборы могут не входить в конструкцию изделия и являются вспомогательными.
Ниже в табл. 7.9.1 приводится техническая характеристика наиболее применяемых
в техническом творчестве электродвигателей.
Производители электродвигателей
Российские производители электродвигателей
| Регион | Производитель | Асинхронный двигатель | Синхронный двигатель | УД | КДПТ | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| СДОВ | СДПМ, серво | СРД, СГД | Шаговый | |||||||
| Краснодарский край | Армавирский электротехнический завод | |||||||||
| Свердловская область | Баранчинский электромеханический завод | |||||||||
| Владимир | Владимирский электромоторный завод | |||||||||
| Санкт-Петербург | ВНИТИ ЭМ | |||||||||
| Москва | ЗВИМосковский электромеханический завод имени Владимира Ильича | |||||||||
| Пермь | ИОЛЛА | |||||||||
| Республика Марий Эл | Красногорский завод «Электродвигатель» | |||||||||
| Воронеж | МЭЛ | |||||||||
| Новочеркасск | Новочеркасский электровозостроительный завод | |||||||||
| Санкт-Петербург | НПО «Электрические машины» | |||||||||
| Томская область | НПО Сибэлектромотор | |||||||||
| Новосибирск | НПО Элсиб | |||||||||
| Удмуртская республика | Сарапульский электрогенераторный завод | |||||||||
| Киров | Электромашиностроительный завод Лепсе | |||||||||
| Санкт-Петербург | Ленинградский электромашиностроительный завод | |||||||||
| Псков | Псковский электромашиностроительный завод | |||||||||
| Ярославль | Ярославский электромашиностроительный завод |
Аббревиатура:
- АДКР —
- АДФР —
- СДОВ — синхронный двигатель с обмоткой возбуждения
- СДПМ — синхронный двигатель с постоянными магнитами
- СРД — синхронный реактивный двигатель
- СГД — синхронный гистерезисный двигатель
- УД — универсальный двигатель
- КДПТ — коллекторный двигатель постоянного тока
- КДПТ ОВ —
- КДПТ ПМ —
Производители электродвигателей ближнего зарубежья
| Страна | Производитель | Асинхронный двигатель | Синхронный двигатель | УД | КДПТ | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| СДОВ | СДПМ, серво | СРД, СГД | Шаговый | |||||||
| Беларусь | Могилевский завод «Электродвигатель» | |||||||||
| Беларусь | Полесьеэлектромаш | |||||||||
| Украина | Харьковский электротехнический завод «Укрэлектромаш» | |||||||||
| Молдова | Электромаш | |||||||||
| Украина | Электромашина | |||||||||
| Украина | Электромотор | |||||||||
| Украина | Электротяжмаш |
Производители электродвигателей дальнего зарубежья
| Страна | Производитель | Асинхронный двигатель | Синхронный двигатель | УД | КДПТ | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| СДОВ | СДПМ, серво | СРД, СГД | Шаговый | |||||||
| Швейцария | ABB Limited | |||||||||
| США | Allied Motion Technologies Inc. | |||||||||
| США | Ametek Inc. | |||||||||
| США | Anaheim automation | |||||||||
| США | Arc System Inc. | |||||||||
| Германия | Baumueller | |||||||||
| Словения | Domel | |||||||||
| США | Emerson Electric Corporation | |||||||||
| США | General Electric | |||||||||
| США | Johnson Electric Holdings Limited | |||||||||
| Германия | Liebherr | |||||||||
| Швейцария | Maxon motor | |||||||||
| Япония | Nidec Corporation | |||||||||
| Германия | Nord | |||||||||
| США | Regal Beloit Corporation | |||||||||
| Германия | Rexroth Bosch Group | |||||||||
| Германия | Siemens AG | |||||||||
| Бразилия | WEG |
ГОСТ 27471-87 Машины электрические вращающиеся. Термины и определения.
И.В.Савельев. Курс общей физики, том I. Механика, колебания и волны, молекулярная физика.-М.:Наука, 1970.
ГОСТ 29322-92 (МЭК 38-83) Стандартные напряжения.
ГОСТ 16264.0-85 Электродвигатели малой мощности
А.И.Вольдек, В.В.Попов. Электрические машины. Машины переменного тока: Учебник для вузов.- СПб.: Питер, 2007.
Paul Waide, Conrad U. Brunner. Energy-Efficiency Policy Opportunities for Electric Motor-Driven Systems. International Energy Agency Working Paper, Energy Efficiency Series.: Paris, 2011.
Dr. J. Merwerth. The hybrid-synchronous machine of the new BMW i3 & i8 challenges with electric traction drives for vehicles. BMW Group, Workshop University Lund: Lund, 2014.
Система трехфазного тока
Техническое значение имеет применение системы трехфазного переменного тока в качестве системы трехфазного тока, основной особенностью которой является то, что сумма всех напряжений и токов всегда равна нулю.
Электрические цепи называются фазами т. Совокупность электрических цепей, в которых напряжения одной частоты оказывают воздействие и имеют фазовый, сдвиг называются многофазными системами. Многофазная система состоит из ветвей обмотки. В многофазной системе может быть п = 3 симметричных систем (рис. «Симметричные системы» ). Во всех симметричных системах — за исключением нулевой системы — сумма всех векторов равна нулю. При количестве фаз т получаем п симметричных систем в зависимости от угла сдвига фаз а:
а = 2π n/m
Задача обмоток — создание вращающегося поля. Асинхронные двигатели имеют такую же конструкцию статора. В воздушном зазоре должно создаваться магнитное поле с постоянной амплитудой, вращающееся с постоянной угловой скоростью. Чтобы создать это поле, временные положения фаз токов должны совпадать с пространственными положениями соответствующих ветвей. У простой симметричной системы (п = 1) с т = 3 три ветви (обозначаемые как U, V и W) и, следовательно, обмотки должны быть равномерно распределены по окружности. На рис. «Обмотка двухполюсного двигателя с одной парой полюсов на каждую ветвь» показано расположение обмотки с тремя ветвями, с одной катушкой на каждую пару полюсов и ветвь. Схемы соединений фаз регламентируются стандартом DIN EN 60034, часть 8.
Создание вращающегося поля
Чтобы создать вращающееся поле в случае с простой симметричной системой (п = 1) с количеством ветвей т = 3, ветви должны быть геометрически смещены на электрически эффективный угол:
аеI = 360°·1/3 = 120°.
При одной катушке на каждую пару полюсов и ветвь создаваемое магнитное поле вращается против часовой стрелки, при этом «индикаторная полоска», смещающаяся вправо на рисунке а, «Создание вращающегося поля с одной катушкой на ветвь» (при а = 90°), показывает ток фазы в каждой из ветвей на рис. Ь, «Создание вращающегося поля с одной катушкой на ветвь» в направлении магнитного потока. Расположение образует пару полюсов. Соответствующие магнитные потоки проходят вертикально к плоскости ветвей обмотки (рис. Ь, «Создание вращающегося поля с одной катушкой на ветвь»).
Поток ФRes (рис. с, «Создание вращающегося поля с одной катушкой на ветвь»), получаемый из трех ветвей, а также его направление достигаются геометрическим сложением трех отдельных потоков ФU, ФV И ФW.
Продвижение индикаторной полоски на угол а = 180° приводит к реверсированию направления тока в ветви W и, следовательно, к дальнейшему повороту созданного поля ФRes вправо (рис. «Создание вращающегося поля с одной катушкой на ветвь 2»).
При использовании двух катушек на одну ветвь расположение проводников «удваивается». Если обмотка должна образовывать две пары полюсов (р = 2), то обмотки необходимо делить на группы (рис. «Обмотка с двумя парами полюсов на каждую ветвь» ). При этом устанавливается механически эффективный угол:
am = 360° · (1/mp) = 60°.
Электрически эффективный угол остается без изменения. В случае как двухполюсного, так и четырехполюсного расположения поле вращается против часовой стрелки (рис. «Создание вращающегося поля с двумя катушками на ветвь» ). Чаcтоту вращения поля:
nd = fn/p
можно вычислить на основании частоты в линии fn и количества пар полюсов р. При р = 1 частота вращения поля равна частоте в линии (табл. «Частота вращающихся полей» ).




Вместе с количеством пар полюсов можно вычислить межполюсное расстояние:
τp = dsi /2π
как долю окружности статора, где dsi — внутренний диаметр статора. Он соответствует длине синусоидальной полуволны, которая соответствует распределению индукции поля ротора. В случае с двухполюсным двигателем (р = 1), межполюсное расстояние всегда равно aei = 180° (электрический угол) и совпадает с механическим углом am. Взаимозависимость этих двух углов показывает угол aei=p—am. Чтобы в обмотках наводилось одинаковое напряжение, ветви обмотки должны быть смещены относительно друг друга на угол aei = 120° или 2τp / 3, а структура и количество катушек должны быть одинаковыми. На каждую ветвь приходится одна треть межполюсного расстояния.
РЕКОМЕНДУЮ ЕЩЁ ПОЧИТАТЬ:





