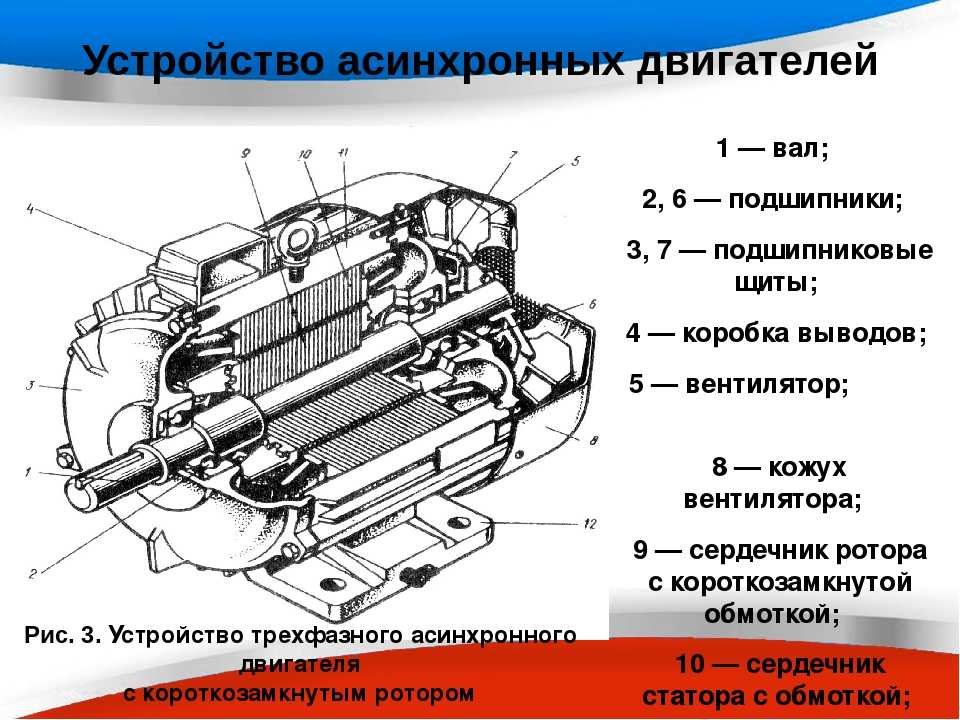
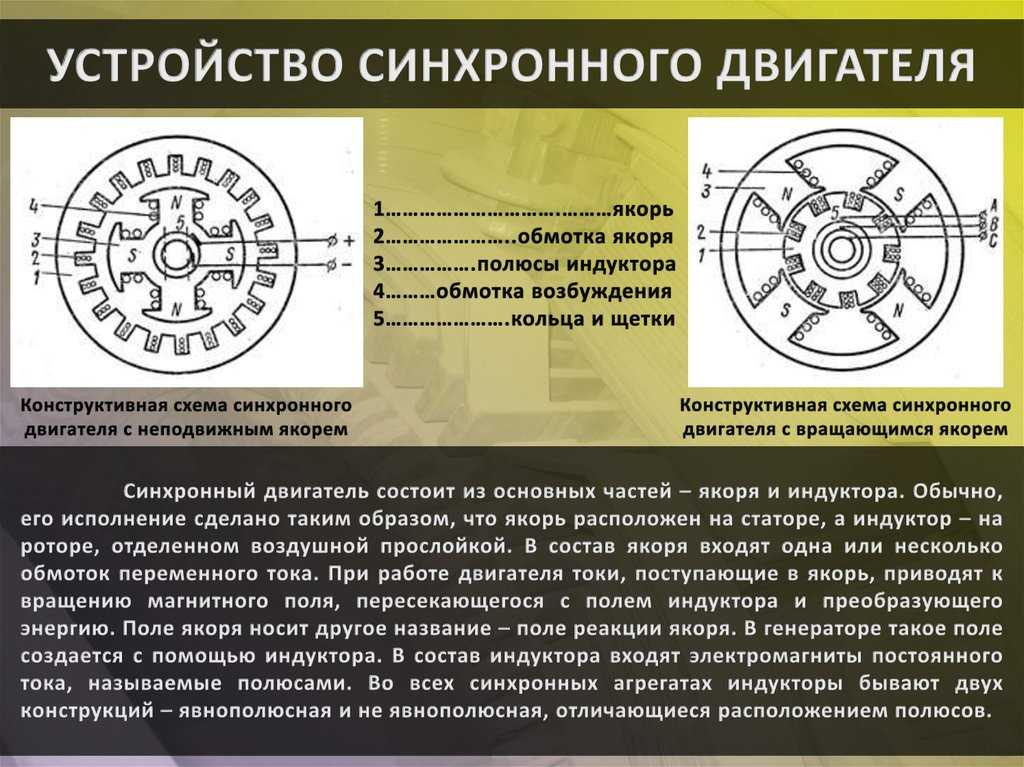
8.3. Бесконтактные двигатели переменного тока
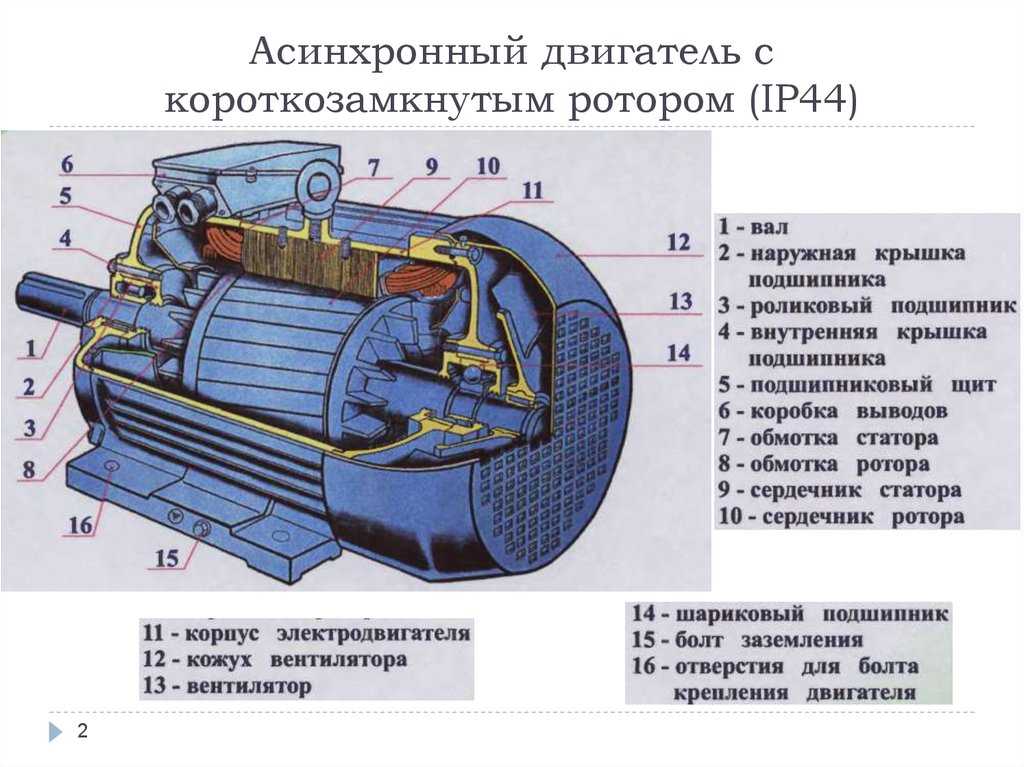
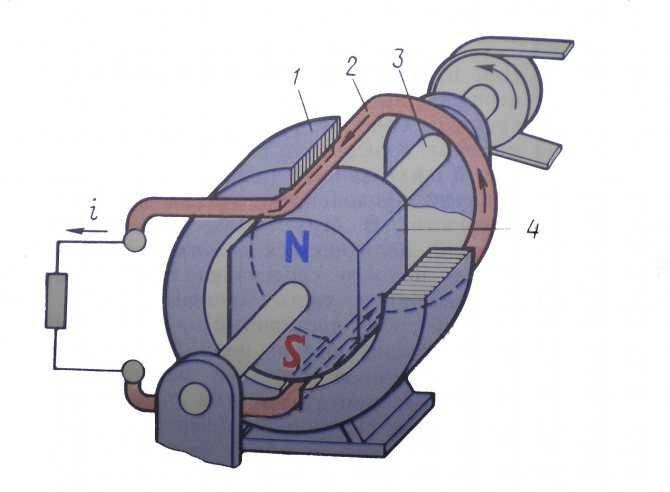
Бесконтактные двигатели постоянного тока состоят из трех элементов (рис. 98):
- двигателя с m-фазной обмоткой на статоре и возбужденным ротором обычно в виде постоянного магнита;
- датчика положения ротора (ДПР), выполненного в одном корпусе с двигателем и предназначенного для выработки сигналов управления моментами времени и последовательностью коммутации токов в обмотках статора;
- коммутатора, как правило, транзисторного, осуществляющего по сигналам ДПР коммутацию токов в обмотках статора.
![]()
Рис. 98. Состав бесконтактного двигателя постоянного тока
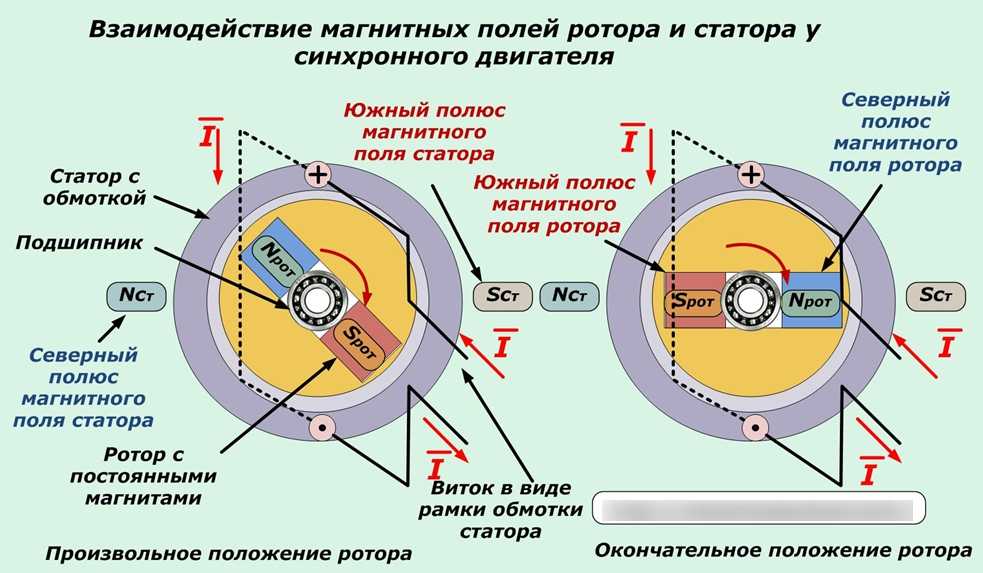
Принцип действия подобен ДПТ:: при включении транзисторов Т1 и Т2 по обмотке статора потечет ток i в указанном направлении. В статоре возбудится магнитное поле, появится движущий момент, ротор повернется таким образом, чтобы векторы Fc и Fp совместились. Когда векторы совместятся, сигнал с ДПР закроет Т1 и Т2 и откроет Т3 и Т4. Ток в обмотке статора поменяет направление, движущий момент заставит ротор вращаться дальше и повернуться на 180°.
Для плавного хода число обмоток обычно 3 и выше. В этой схеме транзисторы и коммутатор работают в ключевом режиме. Транзисторами управляют схемы формирования Фа, Фб, Фс. На эти схемы подаются управляющие импульсы с датчика положения ротора. ДПР имеет и статор и ротор. На статоре имеются полюса, на которых поочередно располагаются обмотки управления а, б, с и обмотки возбуждения (5-30 кГц). Ротор ДПР имеет сектор из магнита мягкого материала. При повороте этот сектор замыкает два соседних полюса и в соответствующей обмотке управления наводится ЭДС, включается соответствующая статорная обмотка и роторы двигателя и ДПР поворачиваются на 120°. Затем сектор замыкает два следующих полюса, в результате роторы поворачиваются еще на 120° и т.д.
![]()
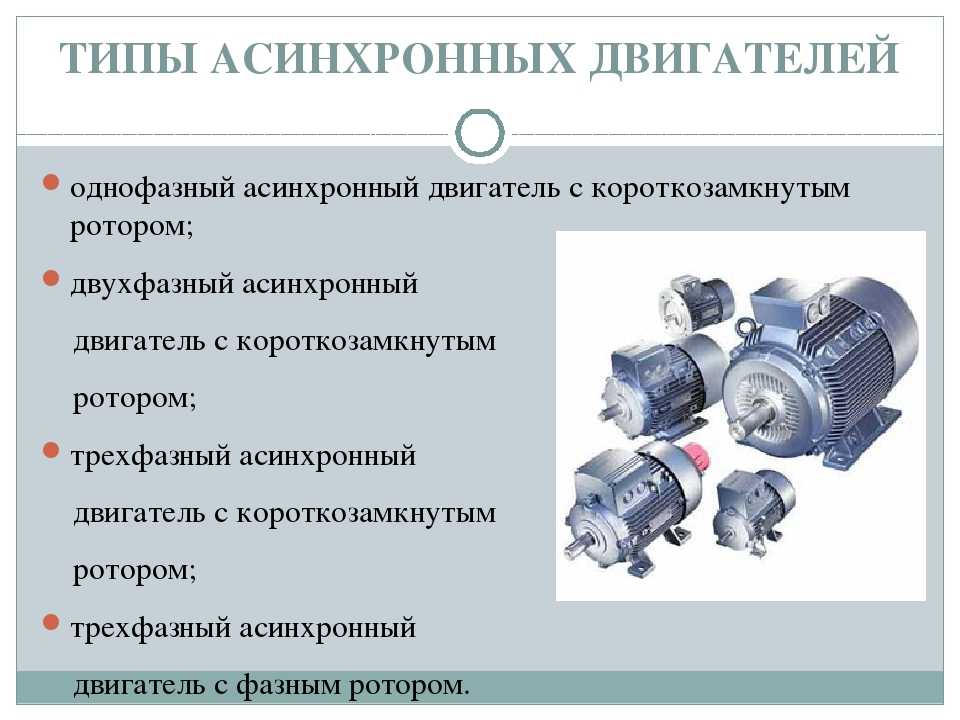
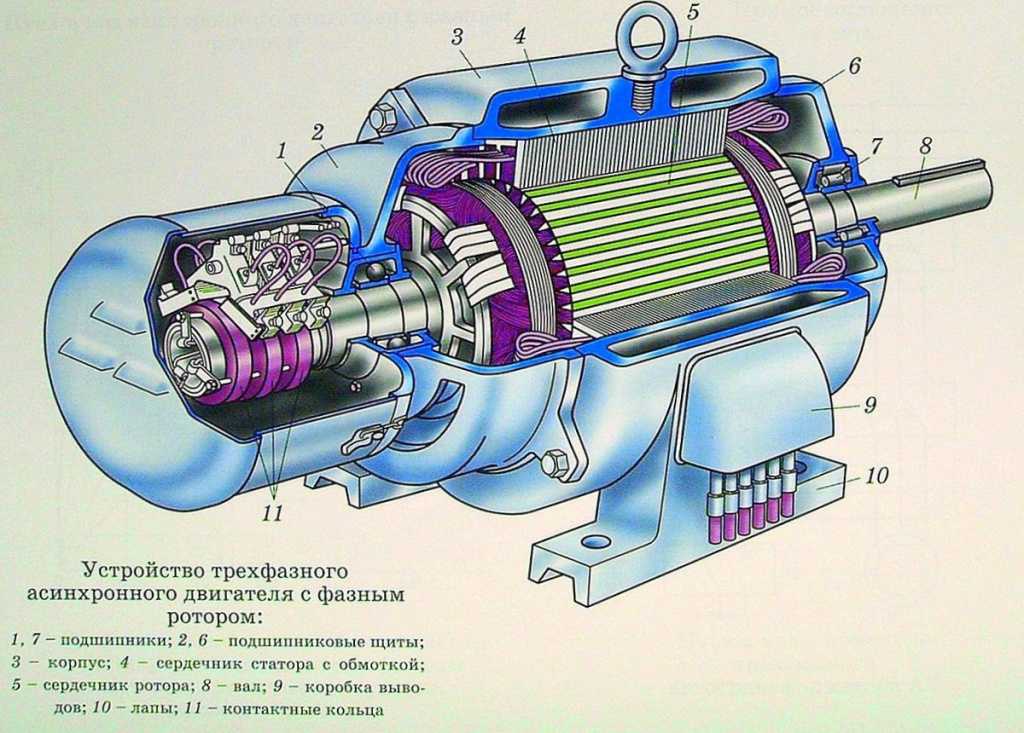
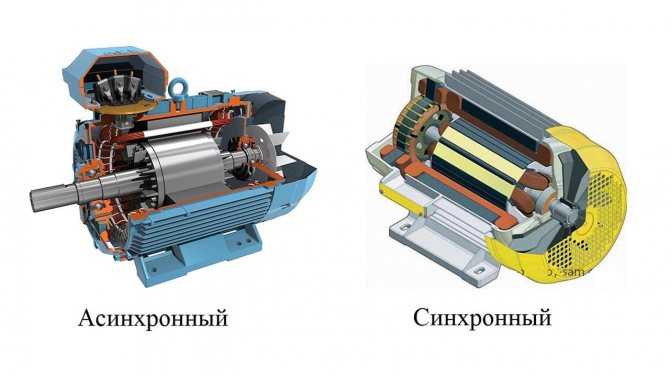
Рис. 99. Схема бесконтактного двигателя постоянного тока.(а) и его механические характеристики (б)
На рис. 99 показаны схема и механические характеристики бесконтактного двигателя при разных индуктивностях обмоток статора L. Видно, что с увеличением L нелинейность характеристик увеличивается.
Частоту вращения бесконтактных двигателей можно регулировать в широких пределах путем изменения напряжения питания.
Однако на практике чаше применяется импульсный способ, сущность которого заключается в изменении не величины постоянно подводимого напряжения, а длительности питания двигателя номинальным напряжением.
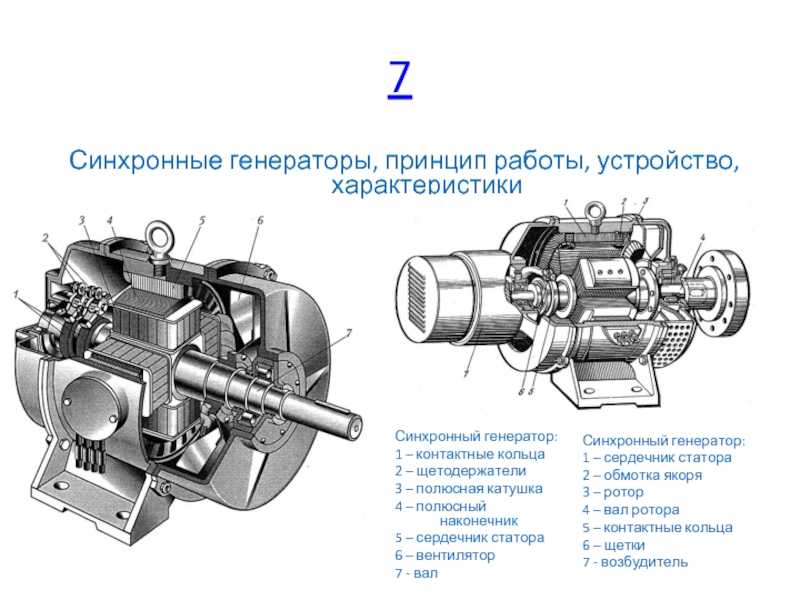
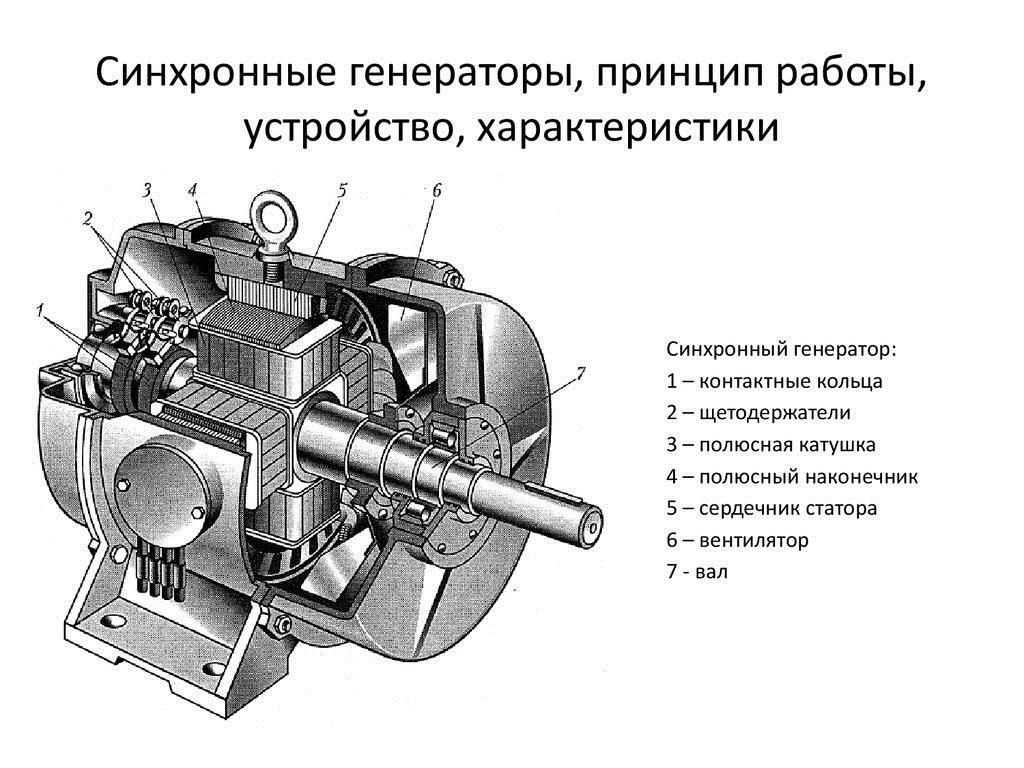
Режимы работы СГ
Нормальные режимы работы характеризуются сколько угодно длительными периодами времени. В их число входят отклонения коэффициентов мощности, выходного напряжения до 5% и частоты до 2,5% от номиналов и т. п. Допуски на отклонения определяются нагревом агрегатов и задаются стандартами или гарантируются производителями.
Блокинг генератор: принцип работы
А нормальные режимы функционирования неприемлемы для продолжительной работы и связаны с появлением перегрузок, с недовозбуждением, переходами в асинхронные режимы. Этот режим работы связан с отклонениями в сети: короткими замыканиями, нагрузками переменного действия, неравномерностью загрузки фаз.
На нормально работающее устройство оказывает влияние подключённая сеть, где нарушения функционирования отдельных потребителей вызывают несимметрию и искажения формы сигнала. Из-за этого могут перегреваться обмотки или конструкция генератора.
Продолжительная работа генератора возможна при различии фазных токов на турбогенераторах до 10% и до 20% на синхронных компенсаторах и гидрогенераторах.
Искажение синусоиды на СГ происходит из-за мощных выпрямителей, преобразователей, электротранспорта и т. д.
Важно для синхронных машин, чтобы нормально работала система охлаждения. Если затраты охлаждающей воды достигают 70% от номинала, срабатывает сигнализация предупреждения
Если расход охладителя снижается наполовину, устройство должно разгружаться за 2 мин, а затем отключаться не более чем за 4 мин.
Характеристики генератора:
- при холостом ходе, когда обмотка якоря не замкнута, устанавливается зависимость ЭДС от токов возбуждения, а также определяется показатель намагничивания сердечников машины;
- внешняя характеристика – зависимость выходного напряжения от нагрузочных токов;
- регулировочные характеристики, проявляющиеся в зависимости токов возбуждения от нагрузочных при автоматическом поддерживании заданных выходных параметров.
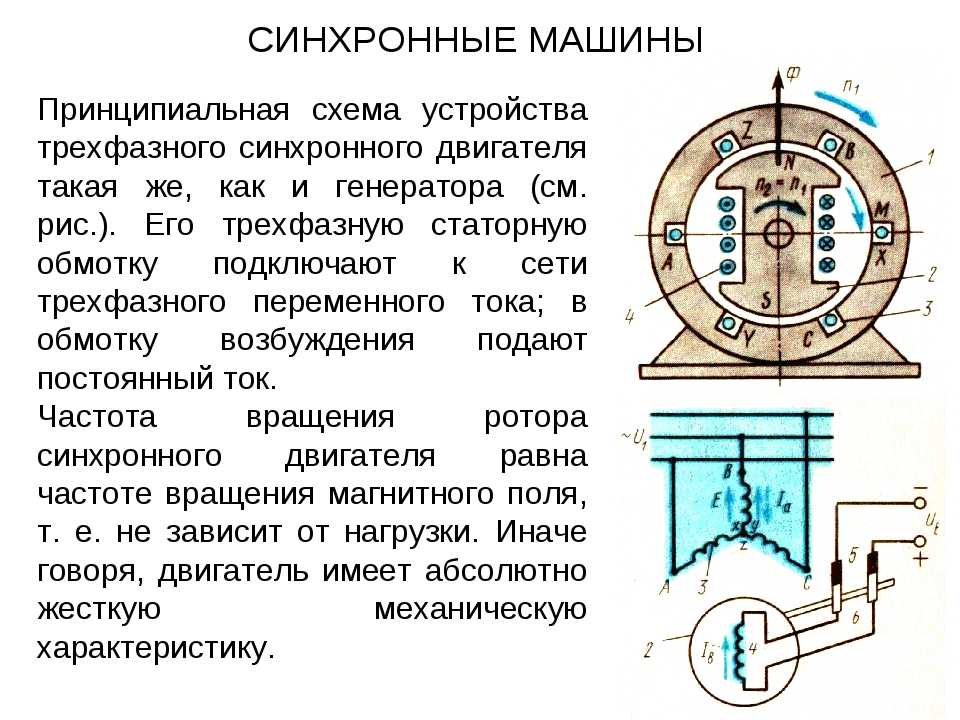
Пуск синхронного двигателя
Синхронный двигатель не имеет начального пускового момента. Если его подключить к сети переменного тока, когда ротор неподвижен, а по обмотке возбуждения проходит постоянный ток, то за один период изменения тока, электромагнитный момент будет дважды изменять свое направление, т.е. средний момент за период равняется нулю. При этих условиях двигатель не сможет прийти во вращение, т.к. его ротор обладающий определенной инерцией, не может быть в течении одного полупериода разогнан до синхронной частоты вращения. Следовательно, для пуска синхронного двигателя необходимо разогнать его ротор с помощью внешнего момента до частоты вращения, близкой к синхронной.
В виду отсутствия пускового момента в синхронном двигателе для пуска его используют следующие способы:
1. Пуск с помощью вспомогательного двигателя.


2. Асинхронный пуск двигателя.
Пуск с помощью вспомогательного двигателя.
Пуск в ход синхронного двигателя с помощью вспомогательного двигателя может быть произведен только без механической нагрузки на его валу, т.е. практически вхолостую. В этом случае на период пуска двигатель временно превращается в синхронный генератор, ротор которого приводится во вращение небольшим вспомогательным двигателем. Статор этого генератора включается параллельно в сеть с соблюдением всех необходимых условий этого соединения. После включения статора в сеть вспомогательный приводной двигатель механически отключается. Этот способ пуска сложен и имеет к тому же вспомогательный двигатель.
Асинхронный пуск двигателя.
Наиболее распространенным способом пуска синхронных двигателей является асинхронный пуск, при котором синхронный двигатель на время пуска превращается в асинхронный. Для возможности образования асинхронного пускового момента в пазах полюсных наконечников явнополюсного двигателя помещается пусковая короткозамкнутая обмотка. Эта обмотка состоит из латунных стержней, вставленных в пазы наконечников и соединяемых накоротко с обоих торцов медными кольцами.
При пуске в ход двигателя обмотка статора включается в сеть переменного тока. Обмотка возбуждения (3) на период пуска замыкается на некоторое сопротивление Rг, рис. 45, ключ К находится в положении 2, сопротивление Rг = (8-10)Rв. В начальный момент пуска при S=1, из-за большого числа витков обмотки возбуждения, вращающее магнитное поле статора наведет в обмотке возбуждения ЭДС Ев, которая может достигнуть весьма большого значения и если при пуске не включить обмотку возбуждения на сопротивление Rг произойдет пробой изоляции.
Рис. 45 Рис. 46.
Процесс пуска синхронного двигателя осуществляется в два этапа. При включении обмотки статора (1) в сеть в двигателе образуется вращающее поле, которое наведет в короткозамкнутой обмотке ротора (2) ЭДС. Под действием, которой будет протекать в стержнях ток. В результате взаимодействия вращающего магнитного поля с током в коротко замкнутой обмотке создается вращающий момент, как у асинхронного двигателя. За счет этого момента ротор разгоняется до скольжения близкого к нулю (S=0,05), рис. 46. На этом заканчивается первый этап.
Чтобы ротор двигателя втянулся в синхронизм, необходимо создать в нем магнитное поле включением в обмотку возбуждения (3) постоянного тока (переключив ключ К в положение 1). Так как ротор разогнан до скорости близкой к синхронной, то относительная скорость поля статора и ротора небольшая. Полюса плавно будут находить друг на друга. И после ряда проскальзываний противоположные полюса притянутся, и ротор втянется в синхронизм. После чего ротор будет вращаться с синхронной скоростью, и частота вращения его будет постоянной, рис. 46. На этом заканчивается второй этап пуска.
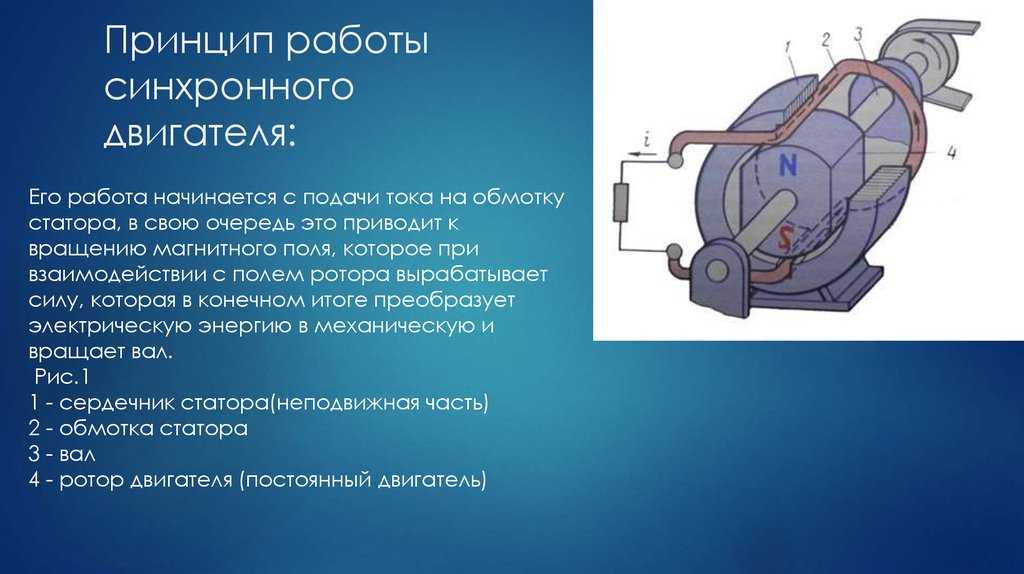
Как работает двигатель
Если кратко, принцип действия синхронного двигателя, как и любого другого, заключается в преобразовании одного вида энергии в другой. А конкретно – электрической в механическую. Работает мотор таким образом:
- На статорные обмотки подается переменное напряжение. Оно создает магнитное поле.
- На обмотки ротора также подается переменное напряжение, создающее поле. Если используются постоянные магниты, то это поле уже по умолчанию имеется.
- Два магнитных поля взаимопересекаются, противодействуют друг другу – одно толкает другое. Из-за этого двигается ротор. Именно он установлен на шарикоподшипниках и способен свободно вращаться, дать ему нужно только толчок.
Вот и все. Теперь остается только использовать полученную механическую энергию в нужных целях. Но требуется знать, как правильно вывести в нормальный режим синхронный двигатель. Принцип работы у него отличается от асинхронного. Поэтому требуется придерживаться определенных правил.
![]()
Для этого электродвигатель подключают к оборудованию, которое необходимо привести в движение. Обычно это механизмы, которые должны работать практически без остановок – вытяжки, насосы и прочее.
Определение и принцип действия
Если говорить простым языком, то синхронным называют электродвигатель, у которого скорость вращения ротора (вала) совпадает со скоростью вращения магнитного поля статора.
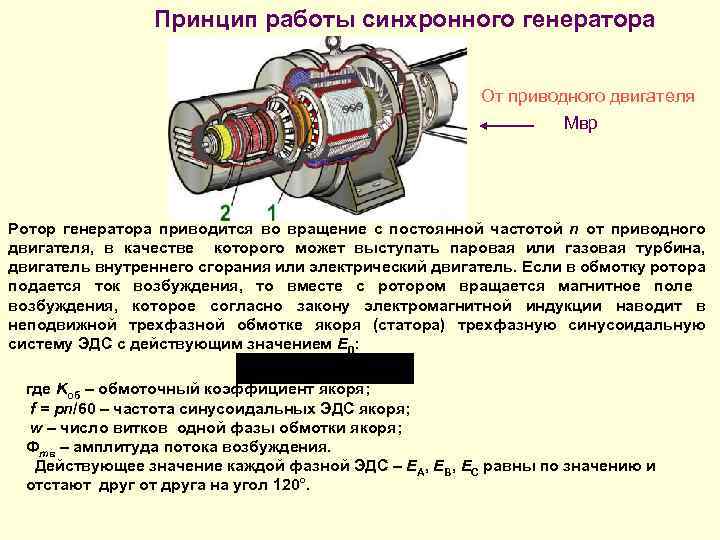
Кратко рассмотрим принцип действия такого электродвигателя — он основан на взаимодействии вращающегося магнитного поля статора, которое обычно создаётся трёхфазным переменным током и постоянного магнитного поля ротора.
Постоянное магнитное поле ротора создаётся за счет обмотки возбуждения или постоянных магнитов. Ток в обмотках статора создаёт вращающееся магнитное поле, тогда как ротор в рабочем режиме представляет собой постоянный магнит, его полюса устремляются к противоположным полюсам магнитного поля статора. В результате ротор вращается синхронно с полем статора, что и является его основной особенностью.
Напомним, что у асинхронного электродвигателя скорость вращения МП статора и скорость вращения ротора отличаются на величину скольжения, а его механическая характеристика «горбатая» с пиком при критическом скольжении (ниже его номинальной скорости вращения).
Скорость, с которой вращается магнитное поле статора, может быть вычислена по следующему уравнению:
N=60f/p
f – частота тока в обмотке, Гц, p – количество пар полюсов.
Соответственно по этой же формуле определяется скорость вращения вала синхронного двигателя.
Большинство электродвигателей переменного тока, используемых на производстве, выполнены без постоянных магнитов, а с обмоткой возбуждения, тогда как маломощные синхронные двигатели переменного тока выполняются с постоянными магнитами на роторе.
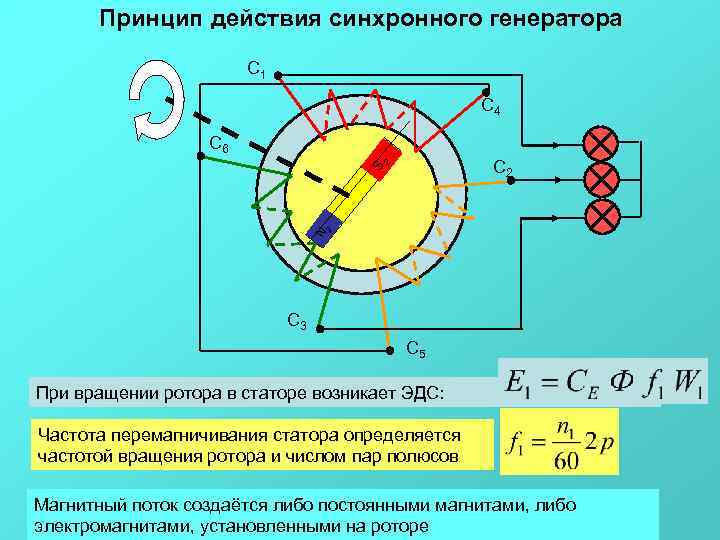
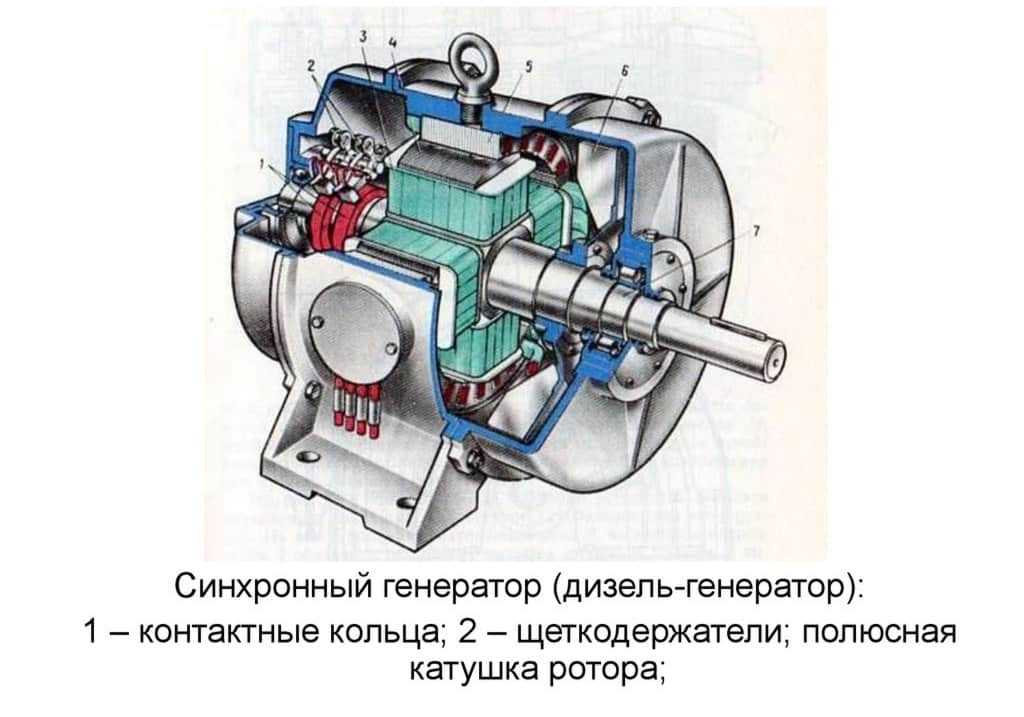
Ток к обмотке возбуждения подводится за счет колец и щеточного узла. В отличие от коллекторного электродвигателя, где для передачи тока вращающейся катушке используется коллектор (набор продольно расположенных пластин), на синхронном установлены кольца поперек одного из концов статора.
![]()
Источником постоянного тока возбуждения в настоящее время являются тиристорные возбудители, часто называемые «ВТЕ» (по названию одной из серий таких устройств отечественного производства). Ранее использовалась система возбуждения «генератор-двигатель», когда на одном валу с двигателем устанавливали генератор (он же возбудитель), который через резисторы подавал ток в обмотку возбуждения.



Ротор почти всех синхронных двигателей постоянного тока выполняется без обмотки возбуждения, а с постоянными магнитами, они хоть и похожи по принципу действия на СД переменного тока, но по способу подключения и управления ими очень сильно отличаются от классических трёхфазных машин.
Одной из основных характеристик электродвигателя является механическая характеристика. Она у синхронных электродвигателей приближена к прямой горизонтальной линии. Это значит, что нагрузка на валу не влияет на его обороты (пока не достигнет какой-то критической величины).
![]()
Это достигается именно благодаря возбуждению постоянным током, поэтому синхронный электродвигатель отлично поддерживает постоянные обороты при изменяющихся нагрузках, перегрузках и при просадках напряжения (до определенного предела).
Ниже вы видите условное обозначение на схеме синхронной машины.
![]()
Основные параметры электродвигателя
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) — векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.
,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
Справка: Номинальный вращающий момент Мном, Нм, определяют по формуле
,
- где Pном – номинальная мощность двигателя, Вт,
- nном — номинальная частота вращения, мин-1
Начальный пусковой момент — момент электродвигателя при пуске.
Справка: В английской системе мер сила измеряется в унция-сила (oz, ozf, ounce-force) или фунт-сила (lb, lbf, pound-force)
1 oz = 1/16 lb = 0,2780139 N (Н)1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)1 lb∙in = 0,112985 Nm (Нм)
Мощность электродвигателя
Мощность электродвигателя — это полезная механическая мощность на валу электродвигателя.
Мощность электродвигателя постоянного тока
Механическая мощность
Мощность — физическая величина, показывающая какую работу механизм совершает в единицу времени.
,
- где P – мощность, Вт,
- A – работа, Дж,
- t — время, с
Работа — скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы .
,
где s – расстояние, м
Для вращательного движения
,
где – угол, рад,
,
где – углавая скорость, рад/с,
Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя
Справка: Номинальное значение — значение параметра электротехнического изделия (устройства), указанное изготовителем, при котором оно должно работать, являющееся исходным для отсчета отклонений.
Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя — характеристика эффективности машины в отношении преобразования электрической энергии в механическую.
,
- где – коэффициент полезного действия электродвигателя,
- P1 — подведенная мощность (электрическая), Вт,
- P2 — полезная мощность (), Вт
- При этом
потери в электродвигатели обусловлены:
электрическими потерями — в виде тепла в результате нагрева проводников с током;
магнитными потерями — потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
механическими потерями — потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
дополнительными потерями — потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.





где n — частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции — скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
,
- где J – момент инерции, кг∙м2,
- m — масса, кг
Справка: В английской системе мер момент инерции измеряется в унция-сила-дюйм (oz∙in∙s2)
1 oz∙in∙s2 = 0,007062 kg∙m2 (кг∙м2)
Момент инерции связан с моментом силы следующим соотношением
,
где – угловое ускорение, с-2
,
Справка: Определение момента инерции вращающейся части электродвигателя описано в ГОСТ 11828-86
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) — напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики .
Электрическая постоянная времени
Электрическая постоянная времени — это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.
,
где – постоянная времени, с
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
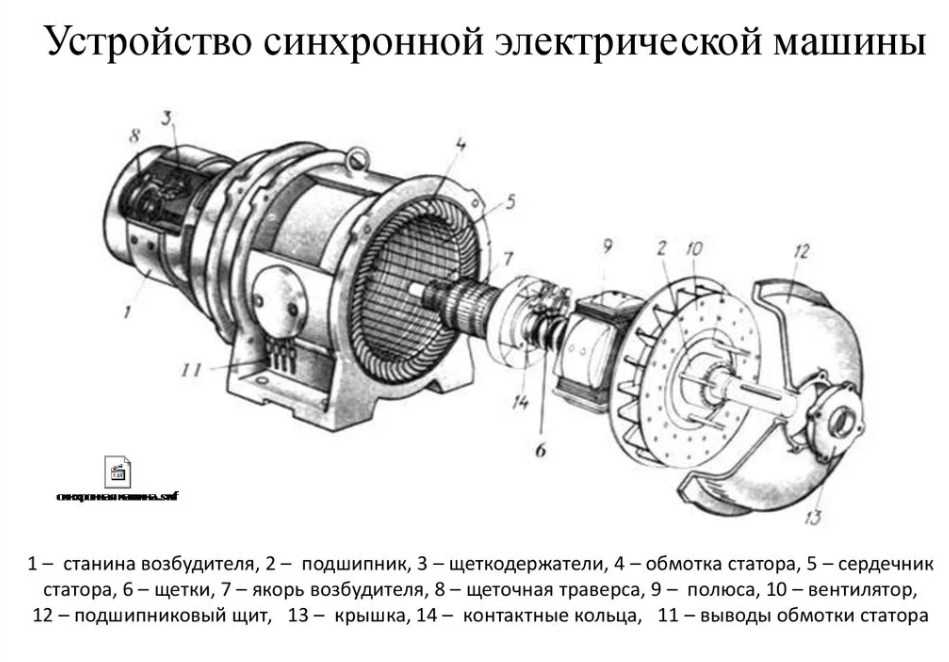
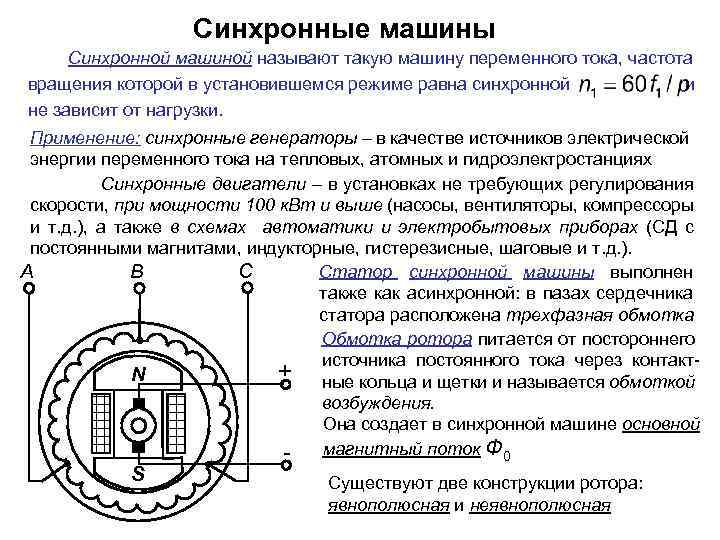
Чем отличается синхронный двигатель от асинхронного
На сегодняшний день асинхронные электродвигатели более распространены, однако они не универсальны. В некоторых ситуациях их использование нельзя считать эффективным решением производственных задач. В таких ситуациях промышленное применение синхронных двигателей считается более оправданным. В чем же разница между синхронными и асинхронными двигателями?
![]()
Под электродвигателем в целом понимается электрическая машина, преобразующая электрическую энергию в механическую при помощи ротора. Такое устройство применяется в различных промышленных механизмах.
Ключевое отличие синхронного и асинхронного двигателей заключается в принципе работы. Синхронный двигатель состоит из ротора и стартера. На роторе имеется обмотка возбуждения, на которую подается постоянный ток. Таким образом, формируется магнитное поле ротора. На стартере, в свою очередь, также имеется обмотка, формирующая свое магнитное поле только уже посредством подачи переменного тока. Частота вращения ротора синхронна частоте подаче тока, отсюда и название двигателя. Характерной особенностью синхронного электродвигателя является способность поддерживать номинальные обороты вне зависимости от мощности нагрузки.
Асинхронный электродвигатель работает по иному принципу. На роторе такого механизма обмотка отсутствует. Вместо нее находятся соединенные стержни. Ротор такого плана называется «беличья клетка». Он не питается током, а полюса на нем индуцируются магнитным полем статора. Под влиянием механической нагрузки частота вращения рамки меньше частоты вращения магнита, то есть частоты не синхронны.
Следует учитывать, что отличить синхронный двигатель от асинхронного по внешним признакам невозможно. Статоры этих механизмов устроены одинаково. Кроме того, функция этих типов электродвигателей одна и та же — создание вращающегося магнитного поля статора. Единственное весомое отличие асинхронного и синхронного двигателей – устройство ротора.
Выбирая между синхронным и асинхронным электродвигателем необходимо отталкиваться от производственных задач. В случаях, когда для работы требуется поддержание постоянных оборотов при различных нагрузках предпочтительнее использовать синхронные двигатели. К примеру, в строительных кранах или гильотинных ножницах. Надо сказать, что асинхронные двигатели в промышленности распространены гораздо больше. Ими оснащены всевозможные станки, транспортеры, вентиляторы, насосы, словом, любое оборудование со стабильной нагрузкой. В их работе снижение оборотов при повышенной нагрузке не является критичным отклонением.


Важное отличие синхронных двигателей – дороговизна. Производство таких механизмов имеет более высокую стоимость, поэтому приобретение и дальнейшее обслуживание также потребует больших вложений
Выводы:
- Асинхронный и синхронный двигатели отличаются принципом работы.
- В синхронном двигателе частота вращения ротора соответствует частоте подаче тока.
- Синхронный двигатель может поддерживать номинальные обороты при любой нагрузке, асинхронный – нет.
- Асинхронные двигатели в промышленности распространены гораздо больше, чем синхронные.
- Синхронные двигатели дороже, чем асинхронные.
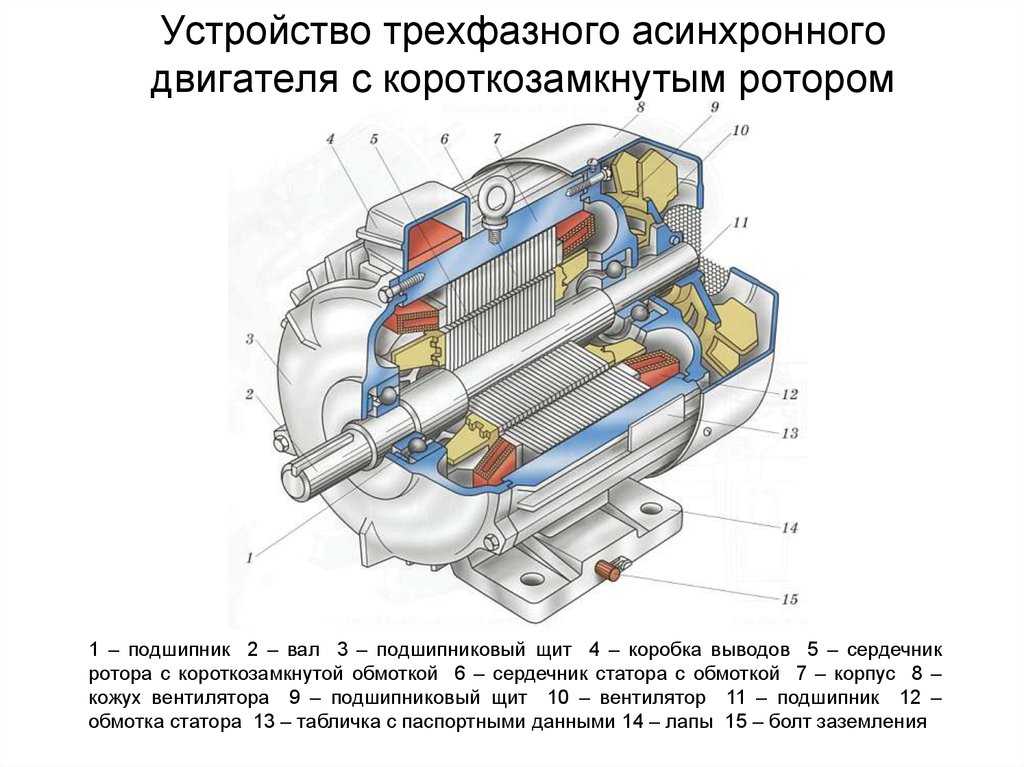
Устройство и принцип работы синхронного трехфазного двигателя
Синхронный двигатель трехфазного тока устойчиво сохраняет частоту вращения или угловую скорость.
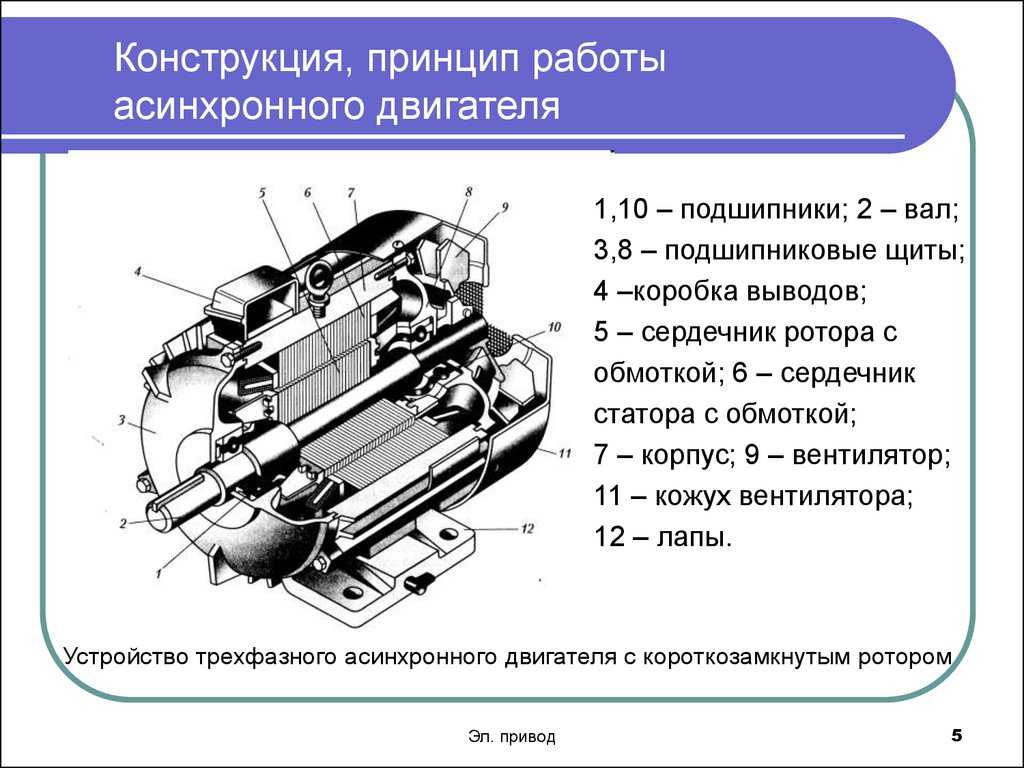
Статор этого двигателя устроен так же, как и асинхронного. Обмотка статора, соединенная в «звезду» или «треугольник», создает при подключении к сети трехфазного тока вращающееся магнитное поле.
Ротор, кроме короткозамкнутых витков, имеет обмотку возбуждения, которая через два контактных кольца и щетки подключена к источнику постоянного тока, составляющего 0,3—3,0% от мощности синхронной машины. Назначение обмотки возбуждения — создание в машине постоянного магнитного поля ротора. Ротор вместе с обмоткой возбуждения называется также индуктором (рис. 5.1).
Короткозамкнутая обмотка предназначена:
- — для пуска в режиме асинхронного двигателя;
- — успокоения качания ротора при работе.
При разгоне двигателя вращающееся магнитное поле статора взаимодействует с короткозамкнутой обмоткой и разгоняет ротор в режиме асинхронного. При достижении скорости, составляющей 95—98% от синхронной, в обмотку возбуждения ротора подается постоянный ток, и двигатель втягивается в синхронизм (рис. 5.2). В момент пуска обмотка возбуждения, во избежание пробоя ее изоляции, замыкается на активное сопротивление. При включении постоянного тока это сопротивление (i?pa3p) отключается.
Угловая скорость ротора остается практически постоянной независимо от момента сопротивления рабочей машины или вращающего момента двигателя, т.е.
Рис. 5.1. Схема синхронного двигателя
Рис. 5.2. Механическая характеристика синхронного двигателя
На самом деле эта скорость колеблется при изменении нагрузки около со, так как магнитно-силовые линии, связывающие магнитные поля статора и ротора, упруги. Упругая связь проявляется в том, что если двигатель нагружать, то ротор на какое-то время отклоняется от оси магнитного поля статора на угол 0 — силовой угол, изменяющий свою величину в зависимости от нагрузки (рис. 5.3). При увеличении нагрузки угол возрастает.
Для определения интервала устойчивой работы и перегрузочной способности синхронного двигателя служит угловая характеристика (рис. 5.4), отражающая зависимость развиваемого двигателем момента М от угла сдвига фаз (0) между напряжением (U) и ЭДС (Е) двигателя.
Рис. 53. Отклонение оси ротора от оси магнитного поля статора
Уравнение угловой характеристики синхронного двигателя носит синусоидальный характер и имеет вид
Анализ (5.1) показывает, что с увеличением 0 в диапазоне от 0 до 90° момент, развиваемый двигателем, увеличивается и достигает своего максимума при 0 = 90° (sin 90° =1). Дальнейшее увеличение угла 0 сопровождается падением момента (рис. 5.4) и «выпадением» из синхронизма.
Рис. 5.4. Угловая характеристика синхронного двигателя
Номинальный момент двигателя соответствует 20—25°.
Главное преимущество синхронного двигателя по сравнению с асинхронным — высокое значение коэффициента мощности (cos(p).
Недостаток — нельзя сделать момент вхождения в синхронизм (Мвх) и пусковой момент (Мпуск) большими. По условиям пуска синхронный двигатель хуже асинхронного.




В сельском хозяйстве эти двигатели применяются для привода крупных насосов оросительных систем.
Рис. 291. Электрическая (а) и электромагнитная (б) схемы синхронного электродвигателя
няется это тем, что ток в обмотку ротора подается от постороннего источника, а не индуцируется в нем магнитным полем статора и, следовательно, не зависит от частоты вращения вала двигателя. Характерной особенностью синхронного двигателя является постоянная частота вращения его ротора независимо от нагрузки.
Если нагрузочный момент Мвн, приложенный к валу электродвигателя, станет больше Мmax, то двигатель под действием внешнего момента Мвн останавливается; при этом по обмотке якоря неподвижного двигателя будет протекать очень большой ток. Этот режим называется выпаданием из синхронизма, он является аварийным и не должен допускаться.
Рис. 292. Электромагнитный момент в синхронной машине, образующийся в различных режимах
Рис. 293. Схема асинхронного пуска синхронного двигателя;
Рис. 294 Устройство пусковой обмотки синхронного двигателя: 1 — ротор; 2 — стержни; 3 — кольцо; 4 — обмотка возбуждения





