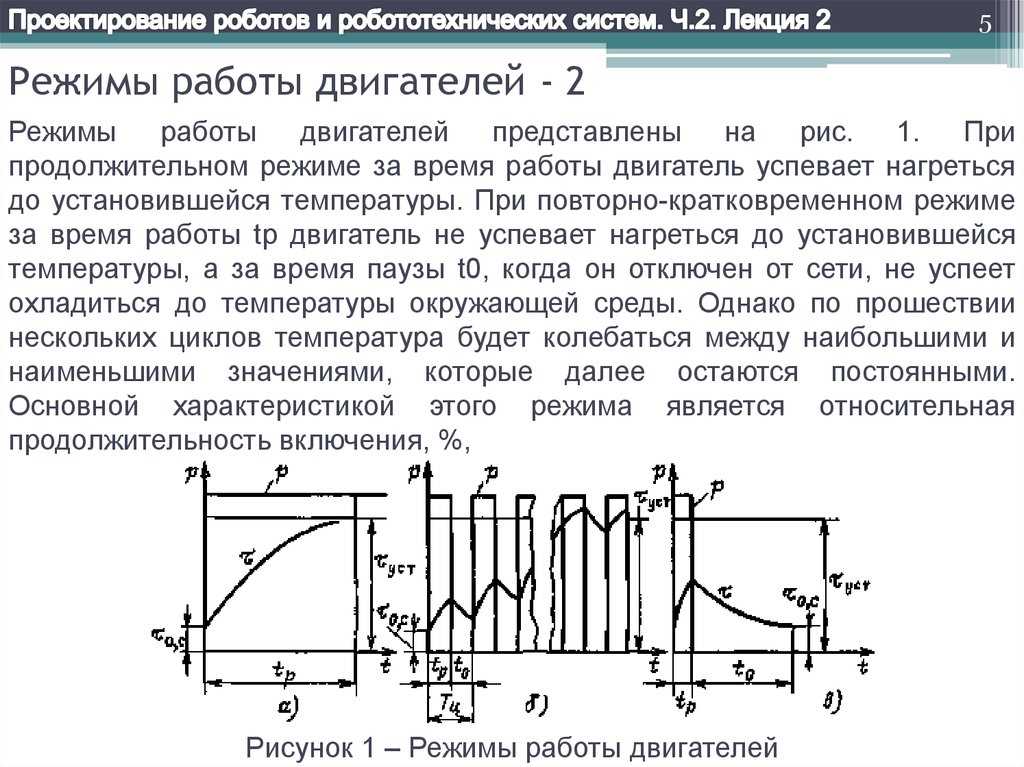
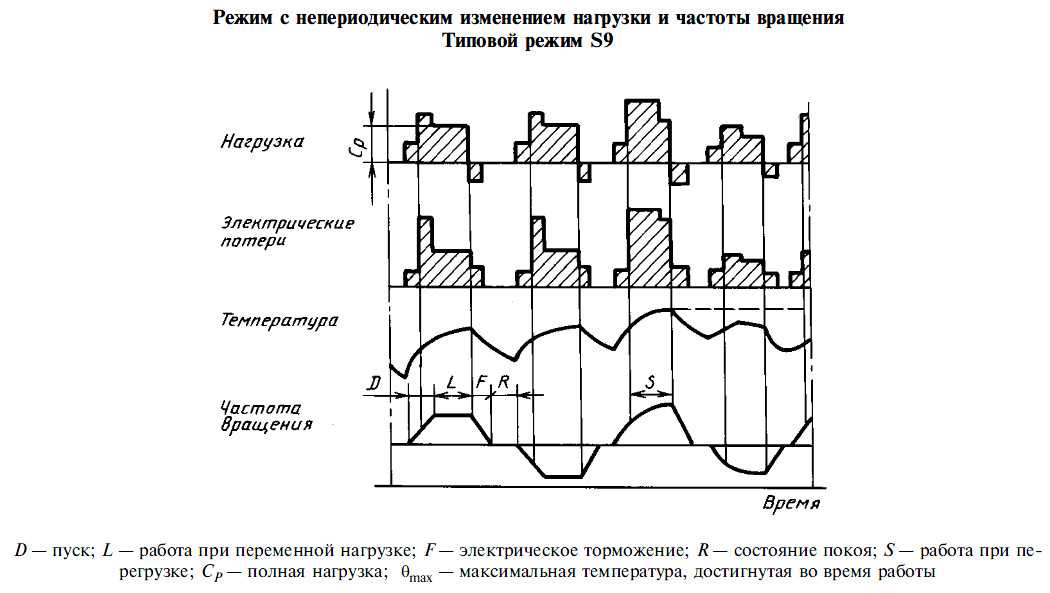
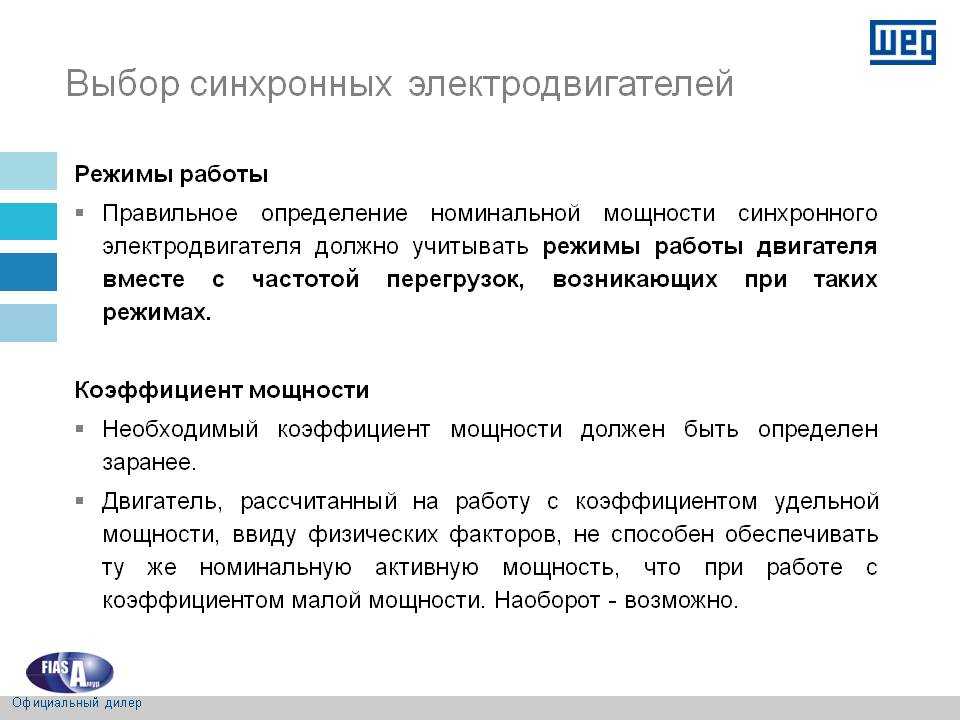
Периодический непрерывный режим с одновременным изменением нагрузки и частоты вращения электродвигателя – типовой режим S8
Периодический непрерывный режим с одновременным изменением нагрузки и частоты вращения (типовой режим S8) – последовательность одинаковых рабочих циклов, каждый из которых состоит из периода работы с постоянной нагрузкой, соответствующей заданной частоте вращения, за которым следует период или несколько периодов работы с другими постоянными нагрузками, соответствующими различным частотам вращения (которые достигаются, например, изменением числа полюсов в случае асинхронных двигателей), см. рис. (F1, F2 – электрическое торможение; D –пуск; N1, N2, N3 – работа при постоянных нагрузках; Omax– максимальная температура, достигнутая в течение цикла). Период покоя отсутствует Продолжительность цикла недостаточна для достижения теплового равновесия.
Продолжительность включения, %:
ПВ = 100 (D + N1) (D + N1 + F1+ N2+ F2+ N3);
ПВ = 100 (F1 + N2) (D + N1 + F1+ N2+ F2+ N3);
ПВ = 100 (F2 + N3) (D + N1 + F1+ N2+ F2+ N3);
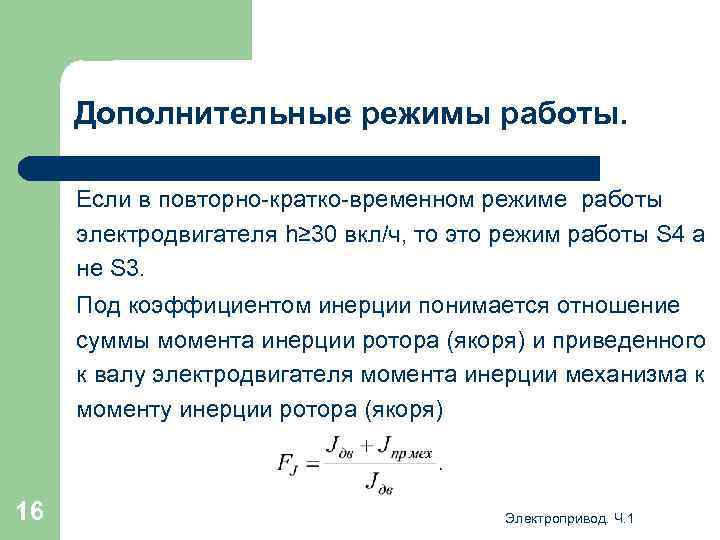
В соответствии с ГОСТ 183 число циклов в час 30, 60, 120 и 240 при коэффициенте инерции FI равном 1,2; 1,6; 2,0; 2,5 и 4,0.
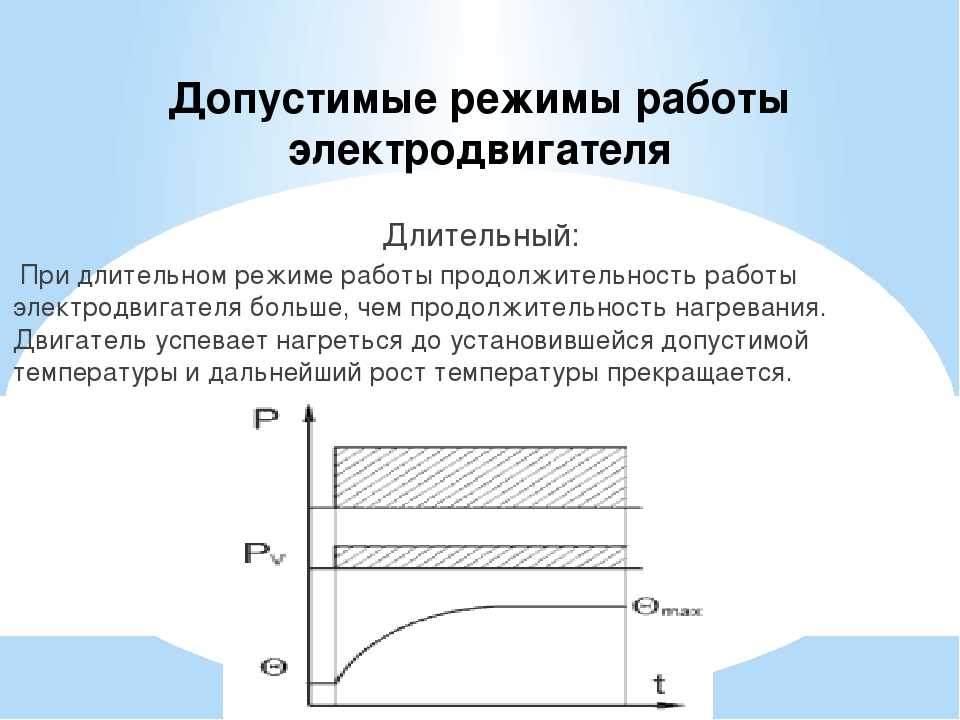
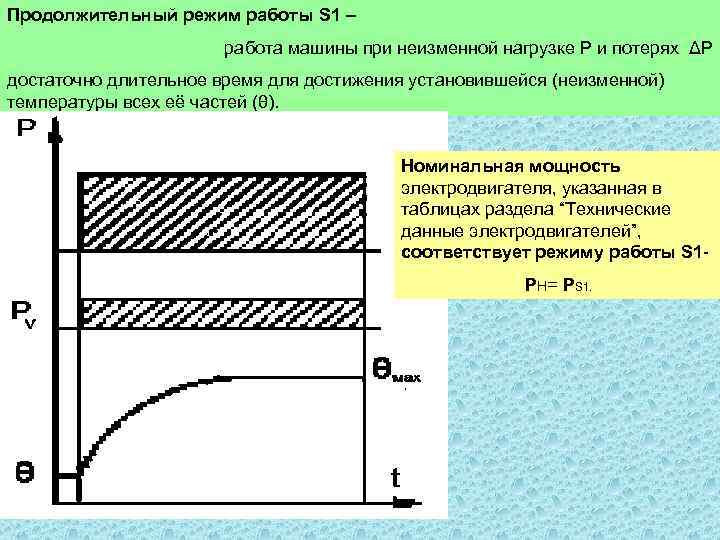
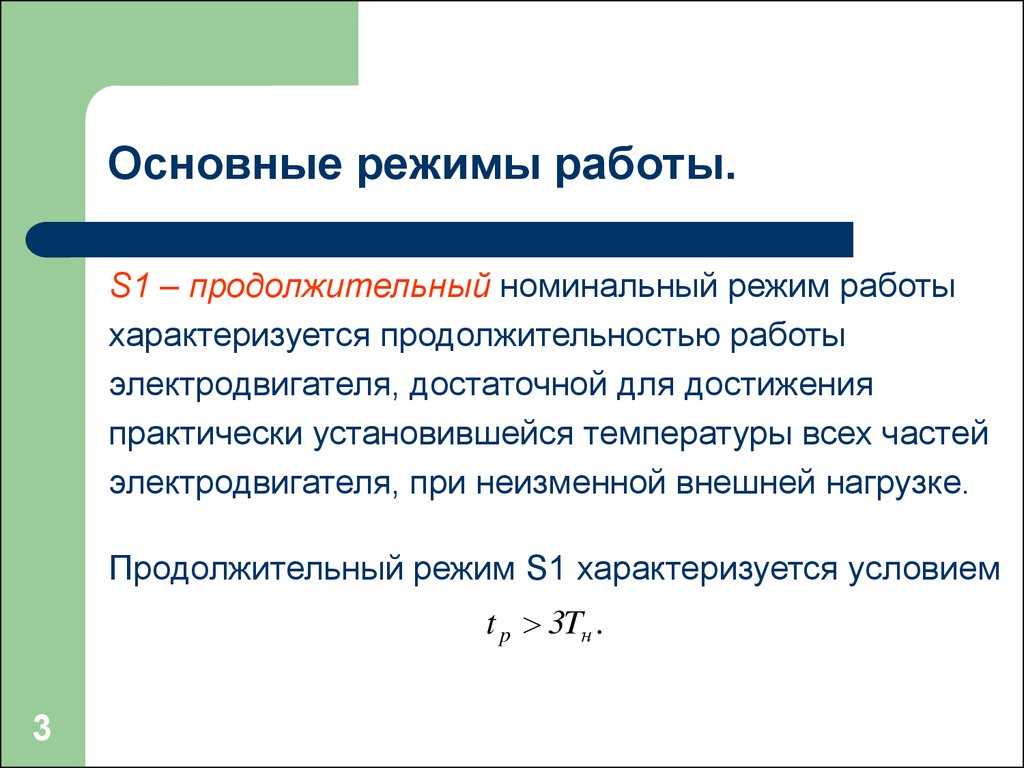
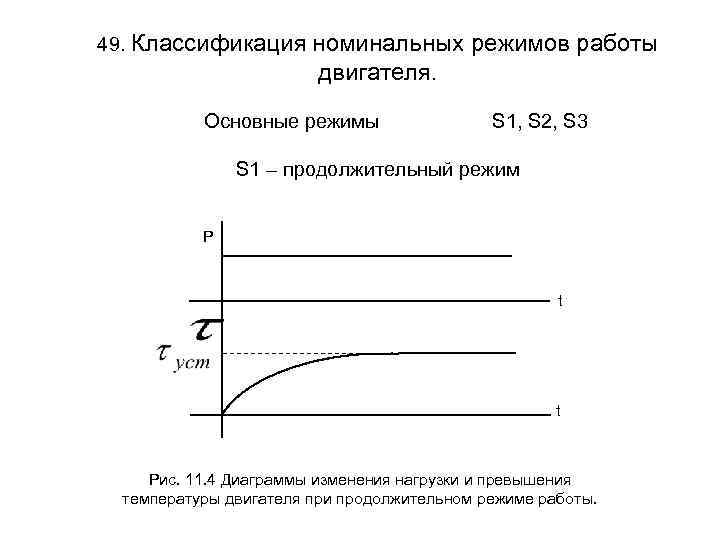
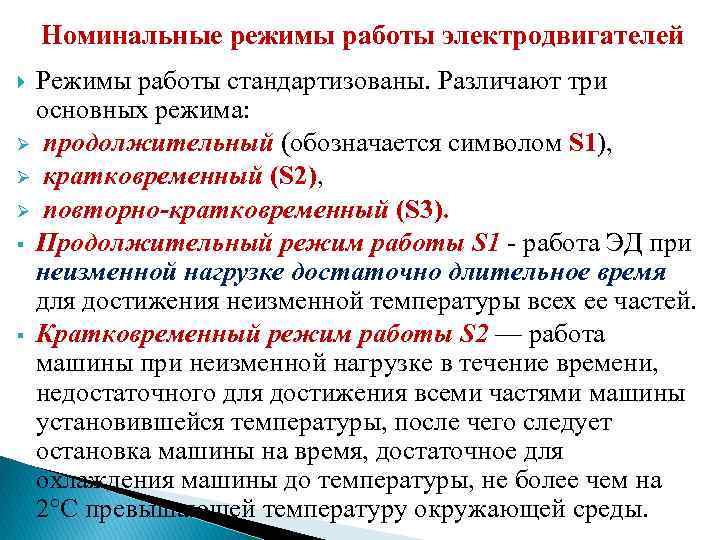
S1 – продолжительный номинальный режим работы электродвигателя
Этот режим работы характеризуется неизменной нагрузкой на валу двигателя в течение всего времени его работы.
![]()
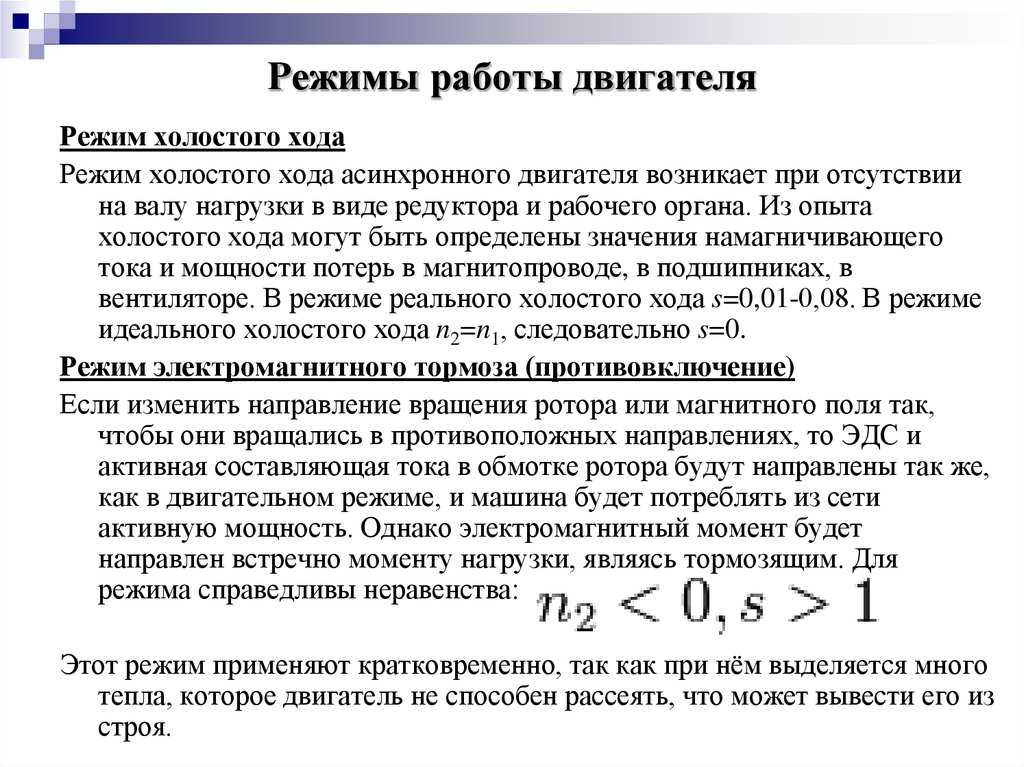
График изменения мощности P на валу электродвигателя, момента M, потерь мощности ΔP и перегрева τ для продолжительного номинального режима работы S1.
Температурный режим двигателя следующий: он разогревается до установившегося перегрева и продолжает работать с этим перегревом весь период работы. Происходит это, потому что потери в двигателе на всем отрезке его работы будут постоянными, как только в двигателе установится квазистационарный процесс, то есть когда количество тепла, выделяемого внутри электродвигателя равно количеству тепла, отдаваемого электродвигателем в окружающую среду.
При таком режиме двигатель моет работать не только с постоянной, но и с циклической нагрузкой.
Особенности шаговых двигателей с редуктором: что это, какие бывают
Шаговые двигателя с редуктором — устройства, комплектуемые цилиндрическим или червячным дополнительным механизмом (редуктором). Кратко рассмотрим особенности каждого из вариантов.
С червяным редуктором
ШД с редуктором червячного типа гарантируют больший момент вращения и активно применяются для станков с ЧПУ и устройств автоматизированного производства. Коэффициент редукции составляет от 1 к 10 до 1 к 60. Привод идет в комплекте, но без выходного вала.
![]()
Червячная передача полезна в случае, когда необходимо добиться высокого момента вращения при минимальной угловой скорости.
Особенность шаговых моторов с рассматриваемым типом редуктора отличается следующими плюсами:
- высокий КПД;
- сравнительно большая нагрузочная способность;
- минимальный люфт выходного вала;
- стабильная работа при пульсирующих режимах;
- плавность хода;
- точная фиксация позиции, благодаря опции самоторможения;
- компактность.
Устройства с червячным мотором отличается простой конструкцией и сравнительно небольшой ценой. При выборе необходимо учесть коэффициент редукции, габариты и будущий режим использования.
Примеры:
- ШД-57 мм с червячным редуктором. Могут быть необслуживаемые и с самостоятельным торможением. Поставляются без вала выходного типа. Одинарный или входной вал можно купить отдельно. Модели — PL57WG76-10 (20, 40, 60) с редукцией 1 к 10, 1 к 20, 1 к 40 и 1 к 60 соответственно.
- ШД-86 мм с червячным редуктором. Здесь условия такие же, как и в рассмотренном выше варианте. Модели — PL86WG118-10 (20, 40, 60) с редукцией 1 к 10, 1 к 20, 1 к 40 и 1 к 60 соответственно.
![]()
С цилиндрическим редуктором
Шаровые двигатели, оборудованные редуктором цилиндрического типа — стандартные устройства, имеющие несколько обмоток, где ток, подаваемый в любую из обмоток статора, вызывает движению ротора.
Последовательная активация обмоток приводит к дискретным угловым перемещениям.
Особенности таких моторов:
- высокий КПД;
- небольшая нагрузочная способность;
- минимальный люфт на выходном валу;
- стабильная работа даже в пульсирующих режимах.
Варианты исполнения:
- Униполярные. Бюджетное решение, построенное на магнитах. Устройство изготовлено из шестеренок, сделанных из пластика, а управление возможно с помощью ULN Подходит для применения с наборами Arduino в системах DIY. Модели — 28BYJ-48-12 или 28BYJ-48-5. Отличаются только сопротивлением. В первом случае 90, а во втором 30 Ом.
- ШД-57 мм (NEMA 23). Шаровые моторы на 57 м с редуктором цилиндрического типа. Момент на выходном валю — до 3 Н*м, а люфт до 1 градуса. Востребованные модели — PL57GH76-3D8, PL57GH76-5D8, PL57GH76-10D8, PL57GH76-20D8, PL57GH76-50D8.
- ШД-86 м (NEMA34). 86-миллиметровые агрегаты с люфтом до 1 градуса и моментом на выходе до 20 Н*м. Популярные модели — PL86GH113-3D14, PL86GH113-5D14, PL86GH113-10D14, PL86GH113-20D14, PL86GH113-50D14.
![]()
Дополнительные варианты: FL86STH65-2808AG3 / -BG3, FL86STH65-2808AG5 / -BG5, FL86STH65-2808AG12.5 / -BG12.5, FL86STH65-2808AG25 / -BG25, FL86STH65-2808AG50 / -BG50 и другие.
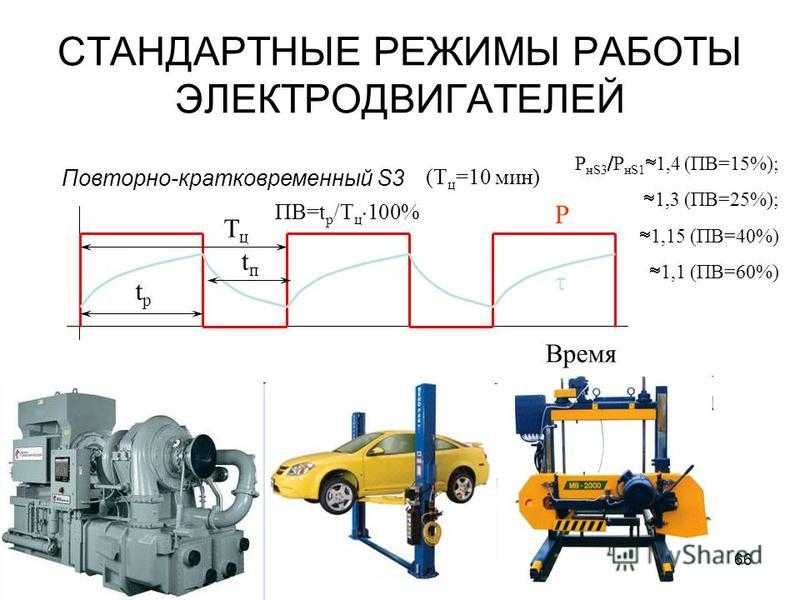
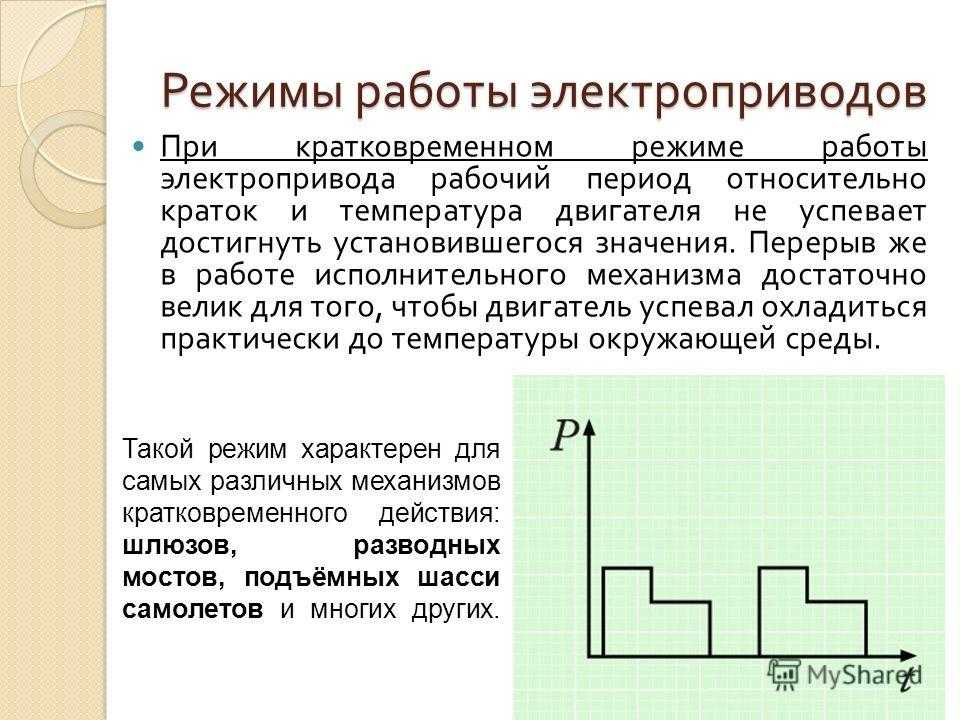

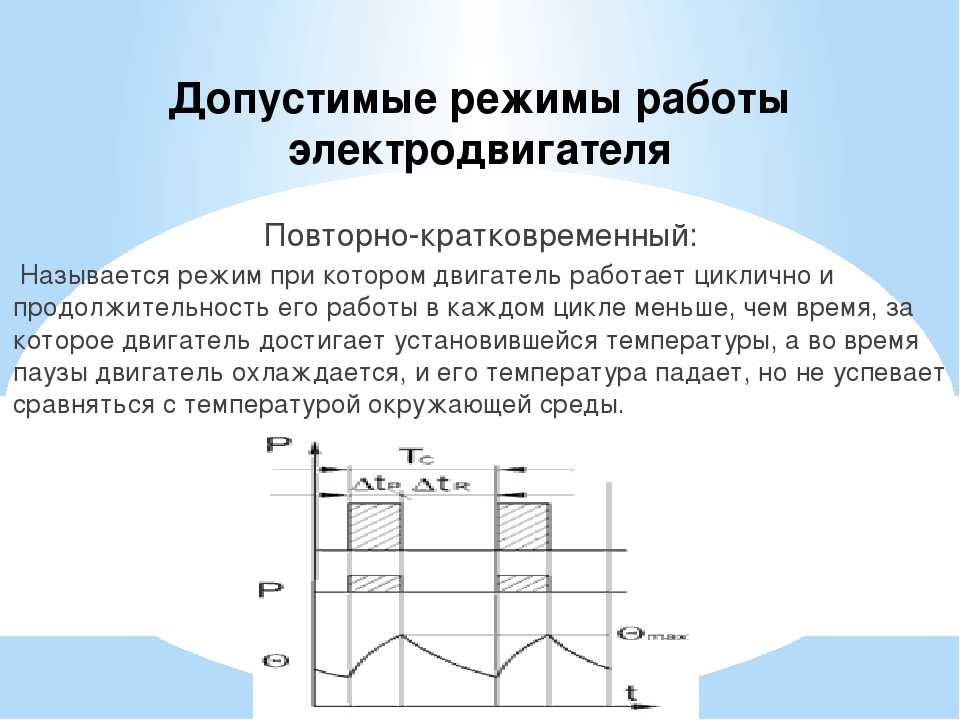
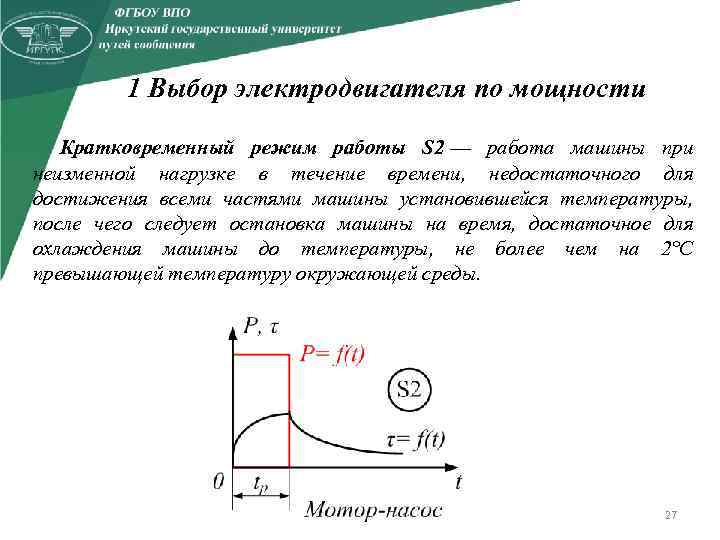
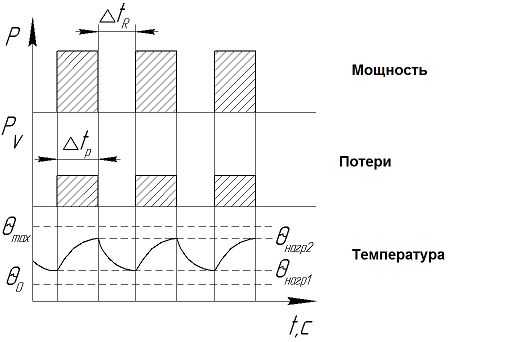
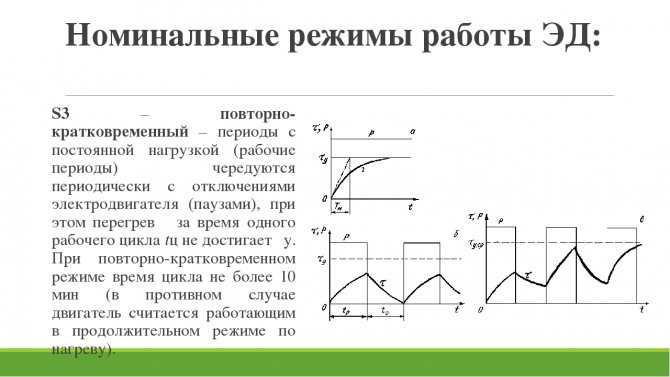
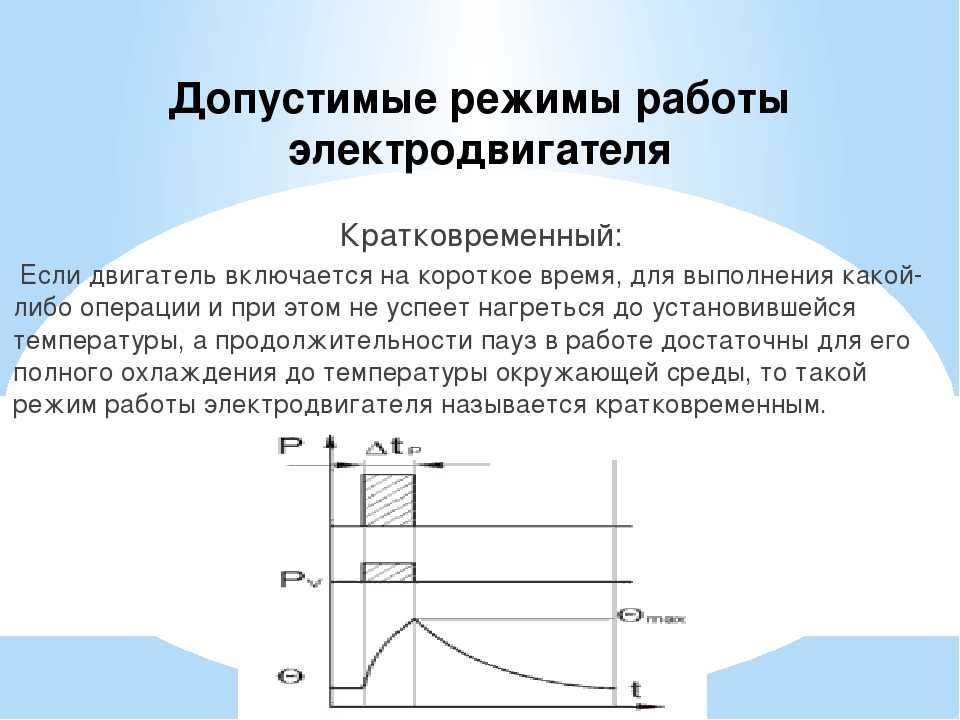
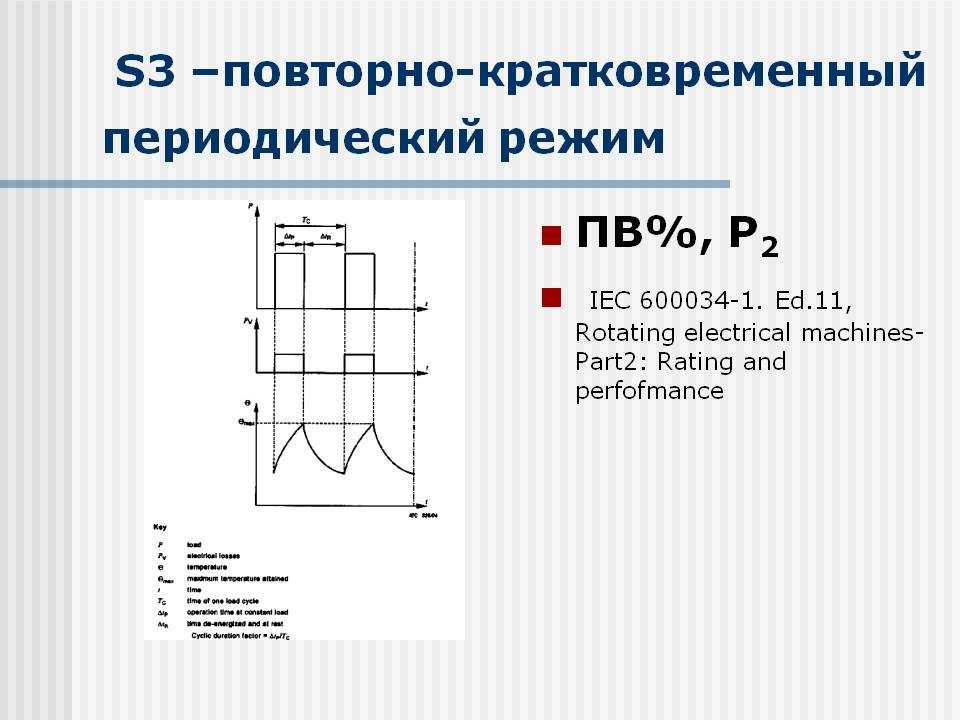
Периодический кратковременный режим работы — типовой режим S3
| Периодический кратковременный режим S3 |
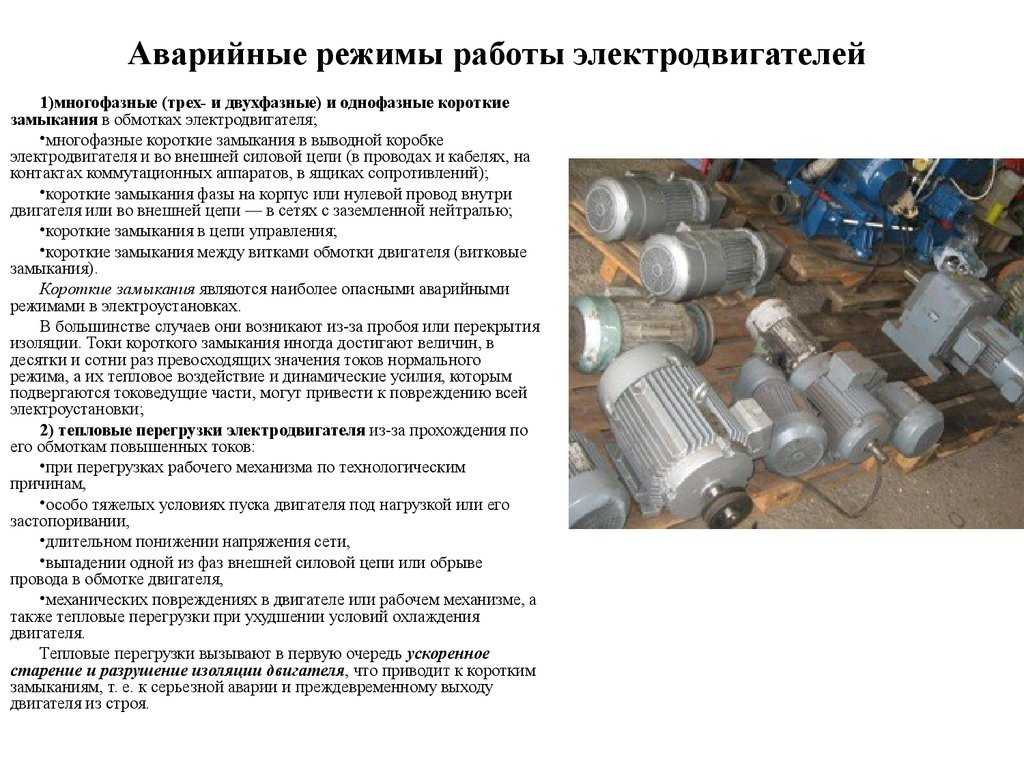
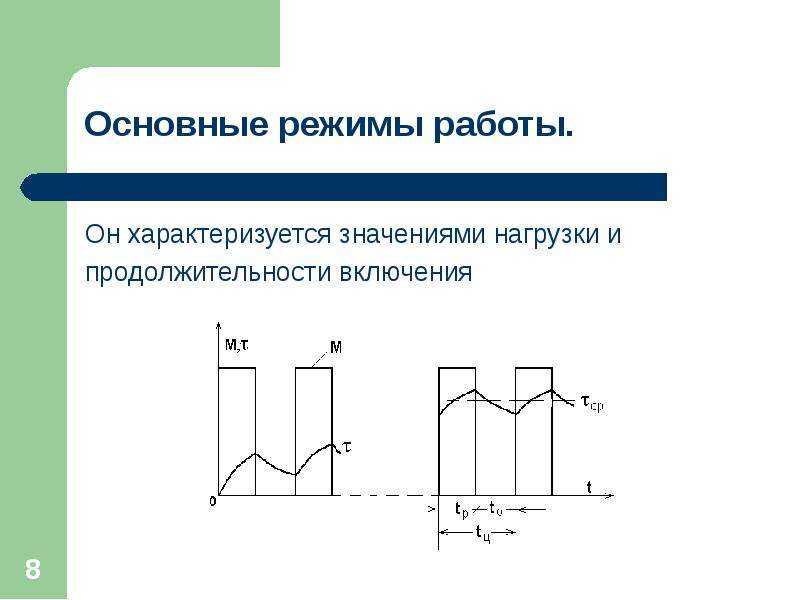
Периодический кратковременный режим (типовой режим S3) – последовательность одинаковых рабочих циклов, каждый из которых состоит из периода работы с постоянной нагрузкой и периода покоя, см. рис. (N – работа при постоянной нагрузке; R – состояние покоя; Omax– максимальная температура, достигнутая в течение цикла).
В этом режиме цикл работы таков, что пусковой ток не оказывает заметного влияния на превышение температуры. Продолжительность цикла недостаточна для достижения теплового равновесия.
Продолжительность включения (ПВ), %: ПВ = 100 N/(N+R).
В соответствии с ГОСТ 183 продолжительность включения (ПВ) 15, 25, 40 и 60 %; продолжительность одного цикла принимают равной 10 мин.
Мощность электродвигателя
В режиме постоянной или незначительно изменяющейся нагрузки работает большое количество механизмов: вентиляторы, компрессоры, насосы, другая техника. При выборе электродвигателя необходимо ориентироваться на потребляемую оборудованием мощность.
Определить мощность можно расчетным путем, используя формулы и коэффициенты, приведенные ниже.
Мощность на валу электродвигателя определяется по следующей формуле:
где: Рм — потребляемая механизмом мощность; ηп — КПД передачи.
Номинальную мощность электродвигателя желательно выбирать больше расчетного значения.
Формула расчета мощности электродвигателя для насоса
где: K3 — коэффициента запаса, он равен 1,1-1,3; g — ускорение свободного падения; Q — производительность насоса; H — высота подъема (расчетная); Y — плотность перекачиваемой насосом жидкости; ηнас — КПД насоса; ηп — КПД передачи.
Давление насоса рассчитывается по формуле:
Формула расчета мощности электродвигателя для компрессора
Мощность поршневого компрессора легко рассчитать по следующей формуле:
где: Q — производительность компрессора; ηk — индикаторный КПД поршневого компрессора (0,6-0,8); ηп — КПД передачи (0,9-0,95); K3 — коэффициент запаса (1,05 -1,15).
Значение A можно рассчитать по формуле:
или взять из таблицы
| p2, 105Па | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| A, 10–3 Дж/м³ | 132 | 164 | 190 | 213 | 230 | 245 | 260 | 272 |
Формула расчета мощности электродвигателя для вентиляторов
где: K3 — коэффициент запаса. Его значения зависят от мощности двигателя:
- до 1 кВт — коэффициент 2;
- от 1 до 2 кВт — коэффициент 1,5;
- 5 и более кВт — коэффициент 1,1-1,2.
Q — производительность вентилятора; H — давление на выходе; ηв — КПД вентилятора; ηп — КПД передачи.
Приведенная формула используется для расчета мощности осевых и центробежных вентиляторов. КПД центробежных моделей равен 0,4-0,7, а осевых вентиляторов — 0,5-0,85.



Остальные технические характеристики, необходимые для расчета мощности двигателя, можно найти в каталогах для каждого типа механизмов.
Важно! При выборе электродвигателя запас мощности должен быть, но небольшой. При значительном запасе мощности снижается КПД привода
В электродвигателях переменного тока это приводит еще и к снижению коэффициента мощности.
Принципы работы
Все электродвигатели имеют неподвижный статор и вращающийся ротор. Разница между асинхронным и синхронным двигателями состоит в принципах создания полюсов. В асинхронном электродвигателе они создаются явлением индукции. Во всех других электродвигателях используются постоянные магниты или катушки с током, создающие магнитное поле.
Особенности синхронных двигателей
Ведущие агрегаты синхронной машины — якорь и индуктор. Якорем является статор, а индуктор располагается на роторе. Под действием переменного тока в якоре образуется вращающееся магнитное поле. Оно сцепляется с магнитным полем индуктора, образованным полюсами постоянных магнитов или катушек с постоянным током. В результате этого взаимодействия энергия электричества преобразуется в кинетическую энергию вращения.
Ротор синхронной машины имеет частоту вращения такую же, как у поля статора. Достоинства синхронных электродвигателей:
- Конструктивно используется и как двигатель, и как генератор.
- Частота вращения, не зависящая от нагрузки.
- Большой коэффициент полезного действия.
- Малая трудоёмкость в ремонте и обслуживании.
- Высокая степень надёжности.
Синхронные машины широко используются как электродвигатели большой мощности для небольшой скорости вращения и постоянной нагрузки. Генераторы применяются там, где требуется автономный источник питания.
Имеются у синхронной машины и недостатки:
- Требуется источник постоянного тока для питания индуктора.
- Отсутствует начальный пусковой момент, для запуска требуется применение внешнего момента или асинхронного пуска.
- Щётки и коллекторы быстро выходят из строя.
Современные синхронные агрегаты содержат в индукторе дополнительно к обмотке, питаемой постоянным током, ещё и пусковую короткозамкнутую обмотку, которая предназначена для пуска в асинхронном режиме.
Отличительные черты асинхронных двигателей
Вращающееся магнитное поле статора асинхронного двигателя наводит индукционные токи в роторе, которые образуют собственное магнитное поле. Взаимодействие полей приводит ротор во вращение. Частота вращения ротора при этом отстаёт от частоты вращения магнитного поля. Именно это свойство отражено в названии двигателя.
Асинхронные электродвигатели бывают двух типов: с короткозамкнутым и с фазным ротором.
Бытовые приборы, такие как вентилятор или пылесос, обычно снабжены двигателями с короткозамкнутым ротором, который представляет собой «беличье колесо». Все стержни замыкаются приваренными с обеих сторон дисками. Взаимодействие магнитного поля статора с наведёнными токами в роторе образовывает электромагнитную силу, которая действует на ротор в направлении вращения поля статора. Крутящий момент на валу электродвигателя создаётся всеми электромагнитными силами от каждого проводника.
В электродвигателе с фазным ротором применяется тот же статор, что и для мотора с короткозамкнутым ротором. А в ротор добавляются обмотки трёх фаз, соединённые в «звезду». К ним можно при пуске двигателя подключать реостаты, регулирующие пусковые токи. С помощью реостатов можно регулировать и частоту вращения двигателя.
Достоинствами асинхронных двигателей можно назвать:
- Питание непосредственно от сетей переменного тока.
- Простоту устройства и сравнительно невысокую стоимость.
- Возможность использования в бытовых приборах с применением однофазного подключения.
- Низкое потребление энергии и экономичность.
Серьёзные недостатки — сложная регулировка частоты вращения и большие теплопотери. Для предотвращения перегрева корпус агрегата делается ребристым, и на вал электродвигателя устанавливается крыльчатка для охлаждения.
https://www.youtube.com/watch?v=hU9krurbi0c
https://www.youtube.com/watch?v=op7J0JPFr7M
Критерии выбора и соимость
Для того, чтобы правильно выбрать наиболее подходящий тип регулятора, нужно хорошо представлять себе, какие есть разновидности таких устройств:
- Различные типы управления. Может быть векторная или скалярная система управления. Первые применяются чаще, а вторые считаются более надёжными.
- Мощность регулятора должна соответствовать максимально возможной мощности мотора.
- По напряжению удобно выбирать устройство, имеющее наиболее универсальные свойства.
- Характеристики по частоте. Регулятор, который вам подходит, должен соответствовать наиболее высокой частоте, которую использует мотор.
- Другие характеристики. Здесь речь идёт о величине гарантийного срока, размерах и других характеристиках.
В зависимости от назначения и потребительских свойств, цены на регуляторы могут существенно различаться.
Большей частью они находятся в диапазоне примерно от 3,5 тысяч рублей до 9 тысяч:
- Регулятор оборотов KA-18 ESC, предназначенный для моделей масштаба 1:10. Стоит 6890 рублей.
- Регулятор оборотов MEGA коллекторный (влагозащищенный). Стоит 3605 рублей.
- Регулятор оборотов для моделей LaTrax 1:18. Его цена 5690 рублей.
Подключение шагового двигателя
Для подачи потенциала на обмотки ШД необходим механизм, способный выдать один или группу импульсов в конкретной последовательности. В роли таких элементов выступают полупроводниковые устройства и драйвера на базе микропроцессоров.
![]()
В них предусмотрена группа выходных клемм, каждая из которых формирует режим функционирования и подачи напряжения.
С учетом схемы подключения используются те или иные выводы устройства. Как результат, удается подобрать конкретную скорость вращения, шаг или микрошаг для перемещения в плоскости.
Всего выделяется шесть основных схем соединения:
- биполярный;
- биполярный с отводом из центральной части обмотки;
- униполярный с четырьмя фазами и подключением пары обмоток;
- четырехфазный униполярный с параллельным подключением;
- четырехфазный униполярный с последовательным соединением.
Если питание шагового двигателя осуществляется от одинакового драйвера, в отношении упомянутых выше схем можно выделять ряд особенностей:
- Отводы всегда подходят к соответствующим клеммам. При последовательном объединении обмоток повышается индуктивность обмоток и снижается ток.
- Пользователь получает паспортные параметры касательно параметров. При параллельном подключении повышается ток и уменьшается индуктивность. Если подключить обмотку по одной фазе, уменьшается момент на низких оборотах, и снижается величина тока.
- Сохраняются динамические и электрические параметры (с учетом данных в паспорте).
- Повышенный момент и использование для получения больших частот.
- Увеличение момента (используется для небольших частот вращения).
Принципиальные схемы подключения показаны ниже.
![]()
![]()
![]()
Для беспроблемной эксплуатации ШД важно помнить о тонкостях подачи номинального напряжения, скорости момента вращения и снижения линейного напряжения. Отдельного внимания заслуживает подключение шагового двигателя к Ардуино
В этом случае управляющие выходы с драйвера подключены цифровым контактам на Arduino Uno
Отдельного внимания заслуживает подключение шагового двигателя к Ардуино. В этом случае управляющие выходы с драйвера подключены цифровым контактам на Arduino Uno.
![]()
Питающее напряжение равно 5 В. Дополнительно можно использовать еще один источник питания во избежание перегрева платы.
Кстати, как сделать умный дом на Arduino читайте тут https://elektrikexpert.ru/arduino.html.
Возможно, вам также будет интересно
Предлагаемая статья отвечает на вопрос: почему необходимо измерять или контролировать сигналы вибрации от двигателя электропривода, в том числе электрических транспортных средств? На примере электродвигателя переменного тока показано, как это можно делать просто и эффективно с помощью DAQ970A Data Acquisition System — новой недорогой системы сбора данных и анализа результатов измерений от к…
Меняющиеся, а иногда просто непрогнозируемые погодные условия и многие другие факторы делают фермерство не очень предсказуемым бизнесом: не всегда есть возможность правильно предварительно просчитать расходы на покупку семян, удобрений, топлива и т.д. Однако в последнее время широкое распространение получила концепция «точного земледелия» — технология, благодаря применению которой можно значите…
Для обеспечения комфортных условий хранения сельскохозяйственной продукции на базе оборудования ОВЕН разработана система автоматического управления «Агро-7 микроклимат», обеспечивающая автономный и непрерывный режим поддержания микроклимата в овощехранилищах вместимостью 500–2000 тонн. Предусмотрена возможность объединения нескольких хранилищ в единый комплекс через последовательный или веб-инт…
Как уменьшить пусковой ток асинхронного двигателя
Решить проблему большого пускового тока электрически можно двумя путями:
- Вначале подавать на двигатель пониженное напряжение, а затем, по мере разгона, напряжение и скорость вращения поднять до номинального значения. Такой способ применяется в электронных устройствах запуска двигателей – софтстартерах (УПП) и преобразователях частоты (частотниках).
- Использовать ограничители пускового тока, когда при пуске двигатель питается через мощные резисторы, а потом по таймеру переключается на номинал. Сопротивление резисторов соизмеримо с сопротивлением обмотки стартера (единицы Ом, в зависимости от мощности). Это устройство легко сделать самому (контактор + реле времени).
- Сразу подавать полное напряжение, но сначала подключать обмотки так хитро, чтобы двигатель не раскручивался на полную мощность. И только когда в этом режиме двигатель раскрутится насколько это возможно, включать его на полную. Эта схема называется “Звезда – Треугольник”, читайте в следующей статье.
Можно сконструировать какую-то муфту, коробку передач, вариатор – для того чтобы раскрутить двигатель вхолостую, а потом подключить потребителя механического момента.
В современном оборудовании двигатели мощнее 2,2 кВт практически никогда напрямую не включают, поэтому для них пусковые токи рояли не играют. Для уменьшения пускового тока (и не только) в основном применяют преобразователи частоты, о которых будут отдельные статьи.
Основные режимы работы ДВС
При эксплуатации автомобиля характерны следующие основные режимы работы двигателя.
Режим запуска холодного двигателя. Этот режим характеризуется плохой испаряемостью топлива, в результате чего воспламеняемость смеси определяется не количеством поданного в двигатель топлива, а количеством той ее части, которая испарилась. Поэтому при запуске холодного двигателя системы запуска должны подавать избыточное количество топлива (l = 0,3-0,4), но фактически воспламеняющаяся смесь соответствует l = 0,9-1,1, а остальное топливо остается в жидком виде. Для компенсации дополнительных потерь на трение из-за повышенной вязкости масла в цилиндры должно подаваться дополнительное количество воздуха. Все это вместе повышает обороты холостого хода холодного двигателя и облегчает его запуск.
Режим работы двигателя на холостом ходу. Этот режим характеризуется малой частотой вращения коленчатого вала, малой скоростью воздушного потока и ухудшением перемешивания смеси. Кроме того этот режим характеризуется значительным содержанием в цилиндрах отработавших газов, что ухудшает процесс сгорания. При применении карбюраторного способа смесеобразования или моновпрыска к указанным факторам добавляется неравномерность распределения смеси по цилиндрам. Все это требует приготовления несколько обогащенного состава смеси (l = 0,8-0,85 ) с тем, чтобы в любом цилиндре оказалась смесь воспламеняющегося состава.
Режим частичных нагрузок ( 20 –80% от номинальной мощности ). Это основной режим работы двигателя при равномерном движении автомобиля. Для этого режима целесообразен экономный режим состава топливно-воздушной смеси, т.е. смесь должна быть обедненной. Этот режим характеризуется удовлетворительными условиями испаряемости топлива и перемешивания смеси, этот режим не требует максимальной скорости сгорания. При любой системе питания двигателя этот режим обеспечивается главной дозирующей системой.
Режим максимальной мощности ( более 80% ). Этот режим используется сравнительно редко, при резком разгоне, на подъемах и т.д.. При работе на этом режиме нужна смесь, обеспечивающая наибольшую скорость сгорания (l =0,8-0,9). С переходом на этот режим необходимо обеспечить обогащение смеси.
Режим ускорения. Этот режим характеризуется быстрым переходом от режима частичных нагрузок к режиму увеличенной или максимальной мощности. Быстрое увеличение частоты коленчатого вала требует обеспечить кратковременное обогащение смеси на этом переходном режиме.
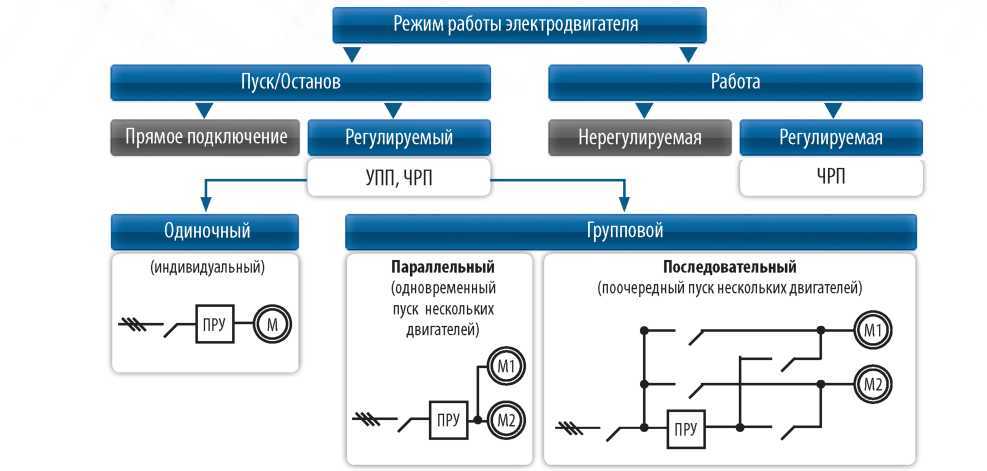
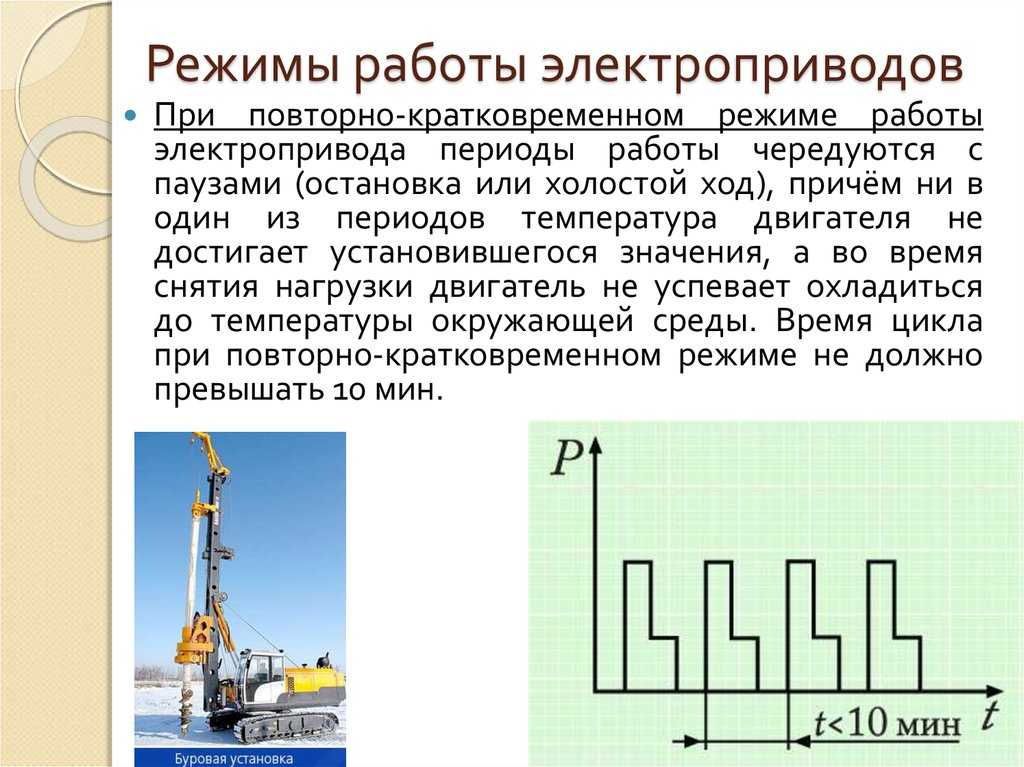
Характер изменений состава смеси на различных режимах работы двигателя показан на рисунке 4
![]()
Рис 4. Зависимость состава топливно-воздушной смеси от режимов работы двигателя.
Реализация этой сложной зависимости при постоянном изменении режимов работы двигателя требует сложных и совершенных систем управления, которые постоянно совершенствуются от простейших карбюраторов пульверизационного типа до современных электронных систем непосредственного впрыска.
Поскольку, как уже отмечалось во ВВЕДЕНИИ в эксплуатации находятся и те и другие, рассмотрим принципы построения этих систем в порядке их появления.
Дата добавления: 2014-11-20 ; Просмотров: 4177 ; Нарушение авторских прав?
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет
Источник
Базовые принципы выбора электродвигателя
Отправными точками для выбора асинхронного двигателя являются напряжение питания обмоток статора, создающего магнитное поле, а также номинальная мощность и скорость вращения ротора, которые соответствуют требованиям конкретного применения. Еще один, не менее важный момент — это необходимый вариант установки двигателя в приводе. Должен ли двигатель иметь крепление на основании, или он будет помещен на фланец на конце привода, или же должен предоставлять обе возможности? Кроме того, необходимо учитывать характеристики окружающей среды, в которой будет эксплуатироваться двигатель. При этом для выбора двигателя необходимо знать, потребуется ли ему работать под дождем и имеется ли вообще риск попадания на него воды, а также оценить уровень загрязнения и наличия пыли. Для эксплуатации в жестких условиях хорошо подходят электродвигатели закрытого типа с вентиляторным охлаждением (англ. totally enclosed fan cooled, TEFC) или электродвигатели закрытого типа без охлаждения (англ. totally enclosed non-vented, TENV). Если среда, в которой будет использоваться двигатель, не загрязнена и он будет эксплуатироваться без риска попадания на него воды, то в этом случае может быть достаточно применения каплезащищенного электродвигателя открытого исполнения (англ. open drip proof, ODP).
Как снизить вред от пускового тока?
Если изменить схему питания двигателя невозможно (например, сосед по даче каждые пол часа запускает токарный станок, а никакие “методы воздействия” не воздействуют), то можно применить различные методы минимизации вреда от пусковых токов. Например:
- На важные потребители или на весь дом установить инверторный ИБП (UPS), который будет держать напряжение в норме при любом раскладе. Самый дорогой, но действенный способ.
- Поставить стабилизатор напряжения. Но учтите, что не все стабилизаторы одинаково полезны. Иногда они могут не справляться, а иногда – даже усугублять ситуацию. Подробнее – по приведенной ссылке.
- Если питание – однофазное, то можно попробовать переключиться с “плохой” фазы на “хорошую”. Иногда этот способ так же эффективен, как использование телепорта вместо автобуса “Таганрог-Москва”.
Но напоминаю, что мы тут занимаемся не устранением последствий, а предотвращением проблем, поэтому погнали дальше.
Статор асинхронного двигателя
Статор асинхронного двигателя представляет из себя сердечник, состоящий из пластин электротехнической стали и содержащий в себе медные обмотки, которые определенным образом уложены в пазах статора.
Как было упомянуто, сердечник статора состоит из пластин, которые изолированы друг от друга. С внутренней стороны статора есть пазы
в которые укладывается изоляция
Далее в эти пазы наматывается медный лакированный провод определенным образом, который представляет из себя обмотки статора
Асинхронный двигатель имеет три «куска» медного провода
Которые определенным образом уложены в пазы статора под углом в 120 градусов друг относительно друга.
Все 6 концов обмоточных проводов выведены в клеммную коробку, которая находится на корпусе двигателя.
Статор двигателя, а точнее, размеры сердечника, количество катушек в каждой обмотке и толщина моточного провода из которого намотаны катушки определяют основные параметры двигателя. Например, от числа катушек в каждой обмотке зависит номинальное число оборотов двигателя, а от толщины провода, которым они намотаны, зависит номинальная мощность двигателя. Количество обмоток для трехфазного асинхронного двигателя всегда равно трем. А вот количество катушек в каждой из этих обмоток разное. Катушки могут наматывать в один или два провода. Учитывая, что номинальное число оборотов двигателя обратно пропорционально номинальной нагрузке, можно смело сказать, что скорость вращения вала асинхронного двигателя будет уменьшаться при увеличении нагрузки. Если при работе двигателя начнут уменьшаться его обороты из-за роста нагрузки, то не остановка этого процесса может привести к полной остановке двигателя. Двигатель начнет сильно гудеть, вал ротора не будет крутиться – возникнет сильный нагрев катушек, с последующим разрушением изоляции моточного провода, что приведет к короткому замыканию и возгоранию обмоток.




Реальное фото статора одного из асинхронного двигателя выглядит вот так.
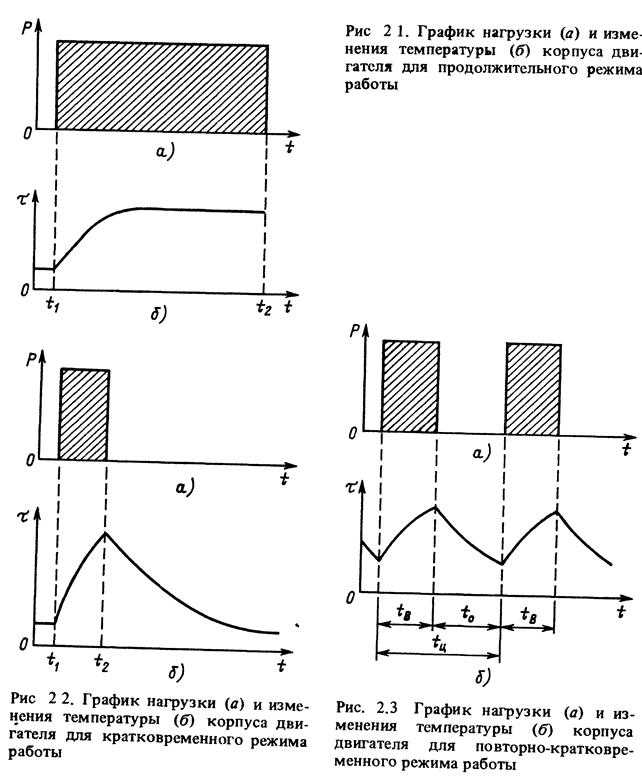
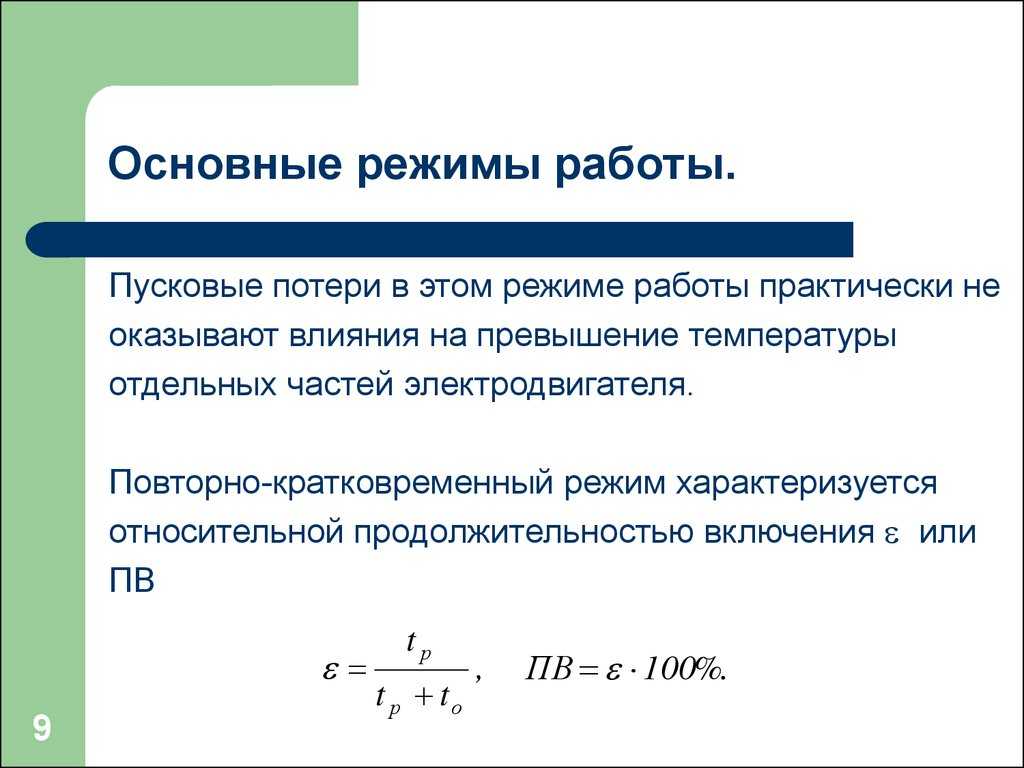
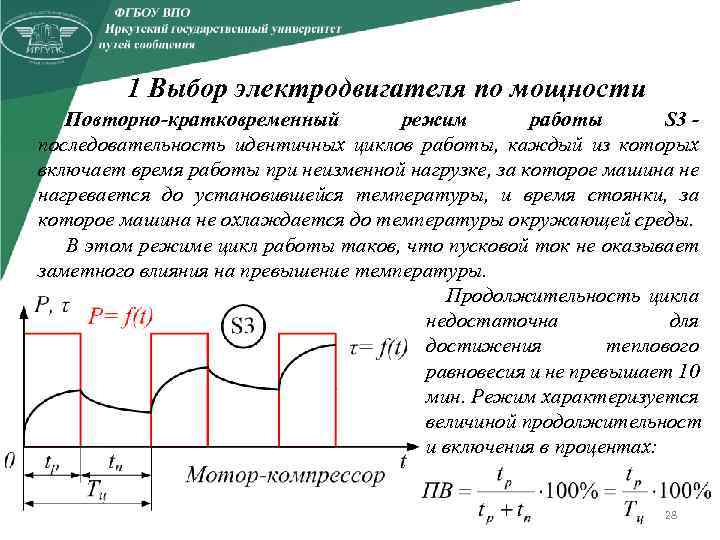
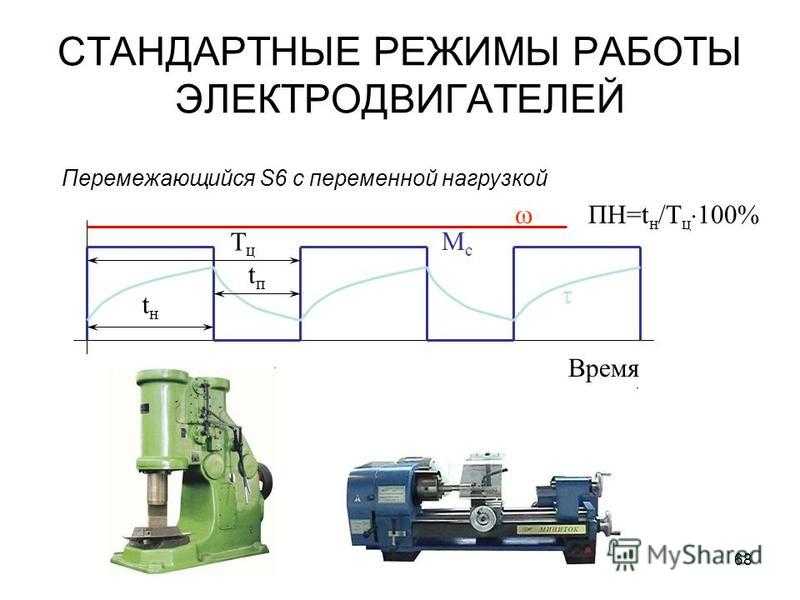
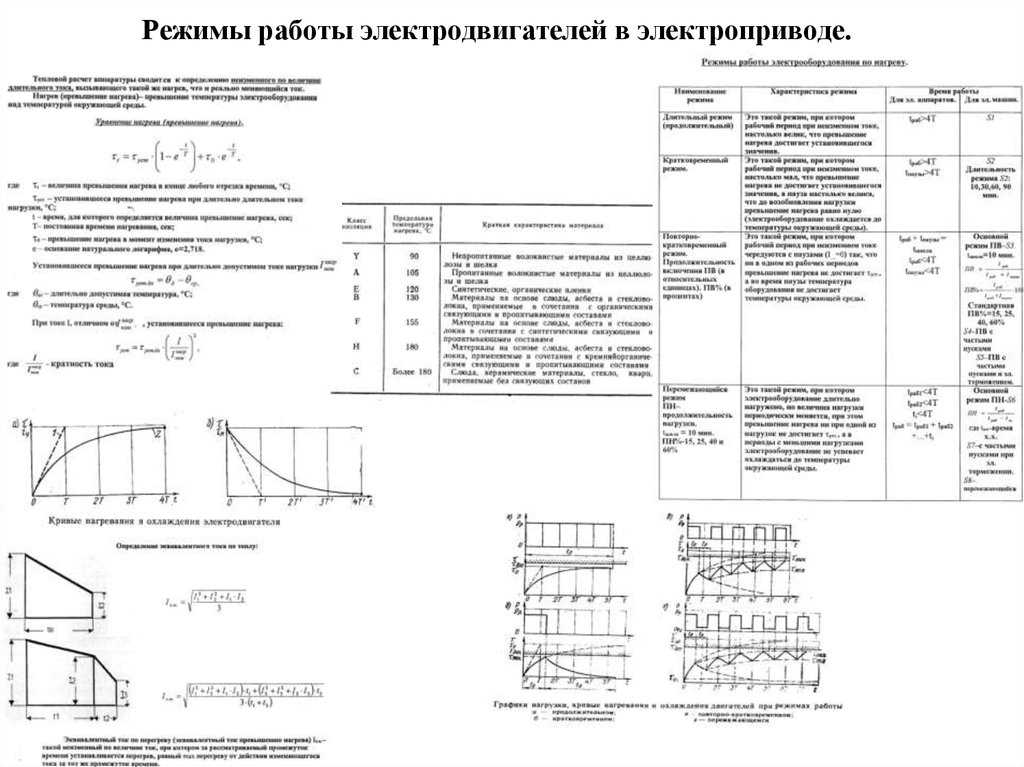
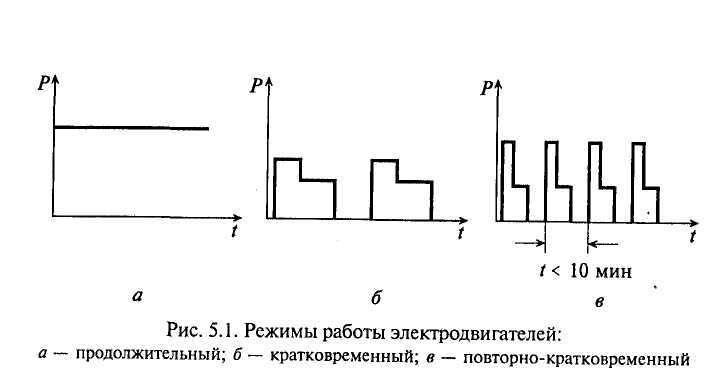
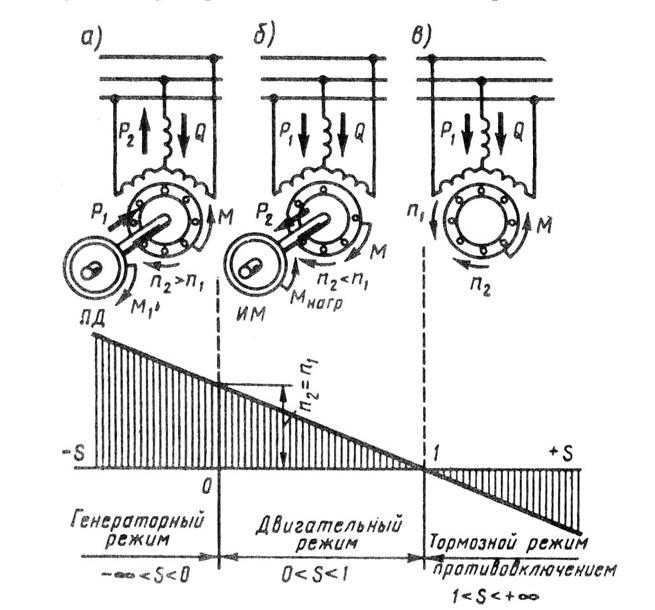
Режимы работы электрических машин
![]()
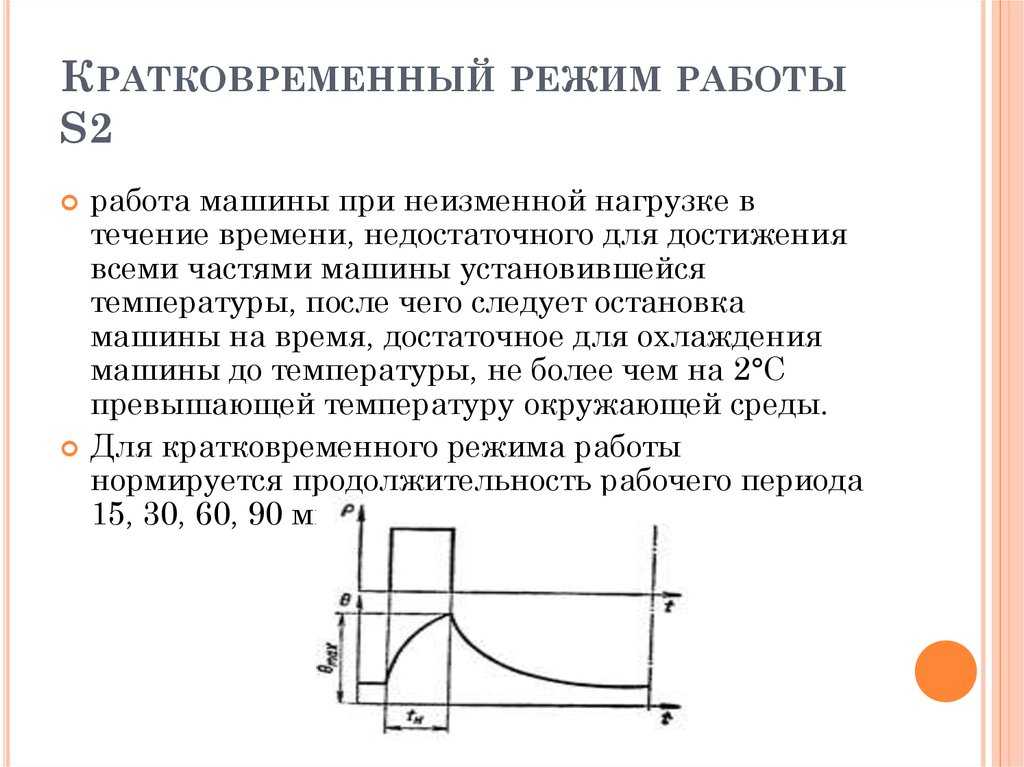
Режим работы электрической машины — это установленный порядок чередования периодов, характеризуемых величиной и продолжительностью нагрузки, отключений, торможения, пуска и реверса во время ее работы.
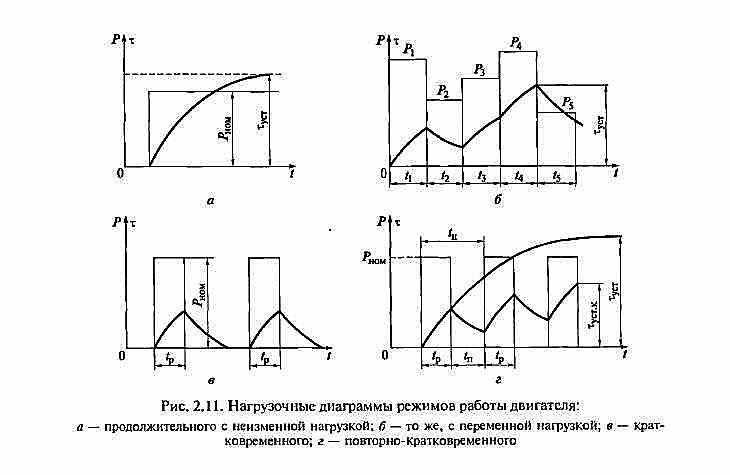
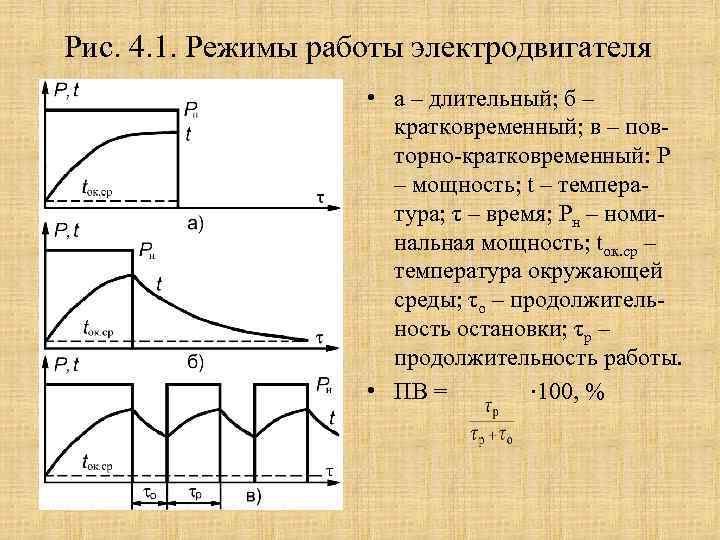
Режимы работы электродвигателей в электроприводах различных рабочих машин разнообразны и определяются технологическими процессами, реализуемыми этими рабочими машинами. Для иллюстрации этих режимов работы используют нагрузочные диаграммы.Такая диаграмма представляет собой графически выраженную зависимость параметра, характеризующего нагрузку приводного двигателя (мощности Р, момента М или силы потребляемого тока I) от продолжительности t отдельных этапов, составляющих время работы электропривода. В действительности нагрузочная диаграмма двигателя может иметь вид графика любой формы: прямой горизонтальной линии, если нагрузка двигателя в рассматриваемый отрезок времени не изменялась, либо кривой линии с плавным переходом от одного уровня нагрузки к другому, если нагрузка изменялась. Плавность перехода уровней нагрузки обусловлена инерционностью процессов в электроприводе. Для упрощения расчета требуемой мощности двигателя криволинейный график нагрузочной диаграммы разбивают на прямолинейные участки, в пределах которых нагрузка условно остается неизменной (рис. 2.10). Чем больше участков с различной нагрузкой, тем меньше ошибка такой замены, но тем сложнее последующие расчеты.
Согласно действующему стандарту ГОСТ 183—74 существует три основных режима работы двигателей, различающиеся характером изменения нагрузки.





